



数字医疗中的步态量化与可视化
Highlights
- 开发一种低成本、便携式、易于使用的数字技术,用于在家或诊所对步态进行精确评估,以改善异常的诊断和管理
- 一种包含五种方法的步态可视化工具:
- 实时表盘可视化
- 单腿时间变化可视化
- 双腿不对称性可视化
- 箱线图可视化
- 综合所有特征的评估
摘要
步态异常在临床实践中较为常见,迫切需要改进相关技术以促进其检测、评估、监测和管理。利用数字技术进行实时评估有助于推动数字医疗的发展。目前的步态评估主要依赖于对结构化临床测试(如“定时起走测试”)的视觉观察。作为金标准方法的“Qualisys动作捕捉系统”则需要在步态实验室中使用复杂的设备,由于成本高、分析耗时以及需要经过培训的技术人员,这些设备尚未广泛普及。因此,开发低成本、便携且易于使用的数字技术对于在家庭或诊所中实现先进的步态评估至关重要。常用的步态量化指标包括对称角、比例和指数,但这些测量值单独呈现时可能难以被用户理解。为了便于运动信息的评估与解释,本文提出了一种可实时可视化步态的工具。该工具包含五种方法:(1:实时表盘可视化,2:单腿时间变化可视化,3:双腿不对称性可视化,4:箱线图可视化,5:综合所有特征的评估)。结果表明,可穿戴惯性测量单元(IMU)可用于提取客观步态特征。该系统为无需复杂实验室设备及其高昂成本的居家步态评估提供了可能,并支持数字医疗的发展。
关键词
G步态可视化、步态不对称性、步态特征提取、惯性测量单元、步态分析
引言
对于研究和解决老龄人口医疗保健问题的研究人员和临床医生而言,一个主要挑战是监测功能状态,并及时启动干预措施,以防止功能能力丧失,从而改善老年人的生活质量(1)。步态改变是多种疾病及疾病进展的指标,也已被证明是中风(2)和帕金森病(3)等不同病症患者康复的决定因素。此外,步态还被用于骨科和康复中的患者进展监测(4)。它也是功能衰退和认知衰退的预测因子(5),并会导致生活质量下降。因此,步态改变引起了多个学科研究人员的关注,其测量具有重要意义。
数字医疗已经彻底改变了多个行业的商业模式,然而,医疗服务中数字服务的采用进展相对缓慢。因此,近年来由于社会需求和技术发展的推动,医疗系统需要更深层次变革的需求日益加剧(6)。在当前的临床实践中,主要使用经过验证的临床测试来识别步态异常。用于分析步态参数的临床量表具有主观性或半主观性,难以有效替代基于实验室的方法来识别步态模式的变化,如对称性和平衡。此类评估工具包括步态异常评分量表(7)、8字行走测试(8)和Berg平衡量表(9)。这些工具大多基于视觉观察,依赖临床专业知识进行评分,且异常通常仅以粗略的分类方式描述为“存在”或“不存在”。更复杂的步态分析需要采用诸如对称指数(SI)(10)、对称比(SR)(11)、比率(Ia)(12)、步态不对称(GA)(13)、对称角(SA)(14)以及对称指数(15)等测量方法。然而,这导致了结果解释上的困难,尤其是对于年轻人和老年人而言,何种步态属于正常尚不明确。最常用的SI方法是将数据归一化至参考值(16),但由于步态随年龄变化(17),这种方法可能存在误差。用于量化步态不对称的均值计算也可能导致错误结果,因为两个异常肢体的测量均值可能看似正常。已有针对手势(18, 19)、运动手势(20)、手持设备(21)和复杂活动(22)的可视化技术。这些技术被应用于从简单手势到复杂活动的检测。我们将在未来的工作中进一步探索这些技术。另一种用于检查非对称步态的可视化表示方法已被开发(23)。该方法通过颜色编码偏差的幅度和方向,将步态变化表示为相对于常模数据的模式偏差。但该系统缺乏定量信息,且未考察双侧参数对称性的变化。目前,此类步态详细分析依赖于步态实验室中的昂贵设备,使大多数患者在经济上难以承受。此外,患者还需前往设备所在地进行检测,因此不适合出行困难的患者。因此,亟需开发新型经济实惠且便携式的产品,以提高所有患者的可及性并减少健康不平等。有必要将步态评估从以医院或实验室为中心的系统转变为以个人或家庭为中心的环境(6)。任何新发展的关键方面之一是进行成本效益分析,以确保新技术物有所值(24)。
为了解决这些考虑,我们开发了一种简单、经济且基于多IMU的可穿戴用户友好型步态可视化工具,其结果易于解释。该工具包含五种可视化方法,可全面评估步态:1)实时可视化;2)单腿时间变化可视化;3)双腿不对称性可视化;4)基于箱线图的可视化;以及5)综合所有特征的步态评估。该工具具有便携性,可用于常规临床实践,包括在患者家中使用。迄今为止,基于经济型融合同步加速度计和陀螺仪数据的自动实时步态可视化技术尚未商业化。本研究旨在基于加速度计和陀螺仪数据可视化步态信息,以提高利用安瓦里 AR 等人(25)提出的自动下肢步态特征提取方法监测步态异常的可靠性和有效性。这可通过开发和使用新型且经济的诊断与步态监测技术来支持数字医疗,从而改变医疗服务的提供方式,使其可在患者家中进行(24)。
下一节介绍我们提出的方法,包括数据采集、步态特征提取和步态可视化。结果部分展示了实验结果以验证所提出的方法。接下来是讨论部分,最后一节是结论。
方法学
本文所采用的材料与方法在以下小节中进行了描述。
数据采集

传感器被放置在双腿的跖骨足部位置以进行数据采集,因为这样可以实现最佳性能(25)。我们设计并开发了一款安卓应用程序,用于从加速度计和陀螺仪进行同步数据采集(26)。通过便利样本招募了20名受试者,包括10名健康年轻受试者和10名老年受试者。他们的人口统计学细节如表1所示。
| 第1组:年轻 | 第2组:老年 | |
|---|---|---|
| 数量 | 10 | 10 |
| 性别(男/女) | 9男,1女 | 9男,1女 |
| Age | 25.3±4.64,范围19‐35岁 | 69.4 ± 7.28,范围62‐86岁 |
| 身高(厘米) | 161.4 ± 16.9 | 152.3 ± 15.4 |
| 体重(千克) | 61.9 ± 4.61 | 63.4 ± 3.03 |
| 身体质量指数 | 24.45 ± 5.77 | 28.14 ± 6.07 |
受试者在直线走廊中进行行走,包括15个步幅的正常向前行走、一次转身以及另外15个步幅。通过将传感器放置在赤脚的左右跖骨足部位置来采集加速度计和陀螺仪数据。图1(b)展示了年轻受试者1所有步幅的加速度计和陀螺仪原始数据。我们的方法已验证可提取人体步态周期(步幅)(26) 中出现的规律特征,这些特征具有显著性。
步态特征提取
步幅、支撑、摆动和步相检测
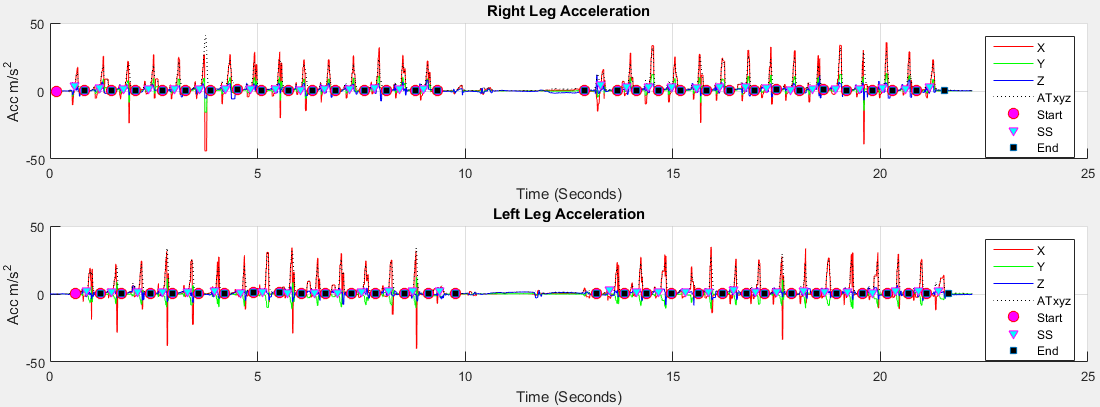
步幅检测技术基于与时变加速度幅值相关的步幅局部最小显著性特征(26)。该技术可检测双侧下肢的足部首次触地(步态周期开始)、支撑期末、摆动相开始、摆动期末以及新步态周期开始。
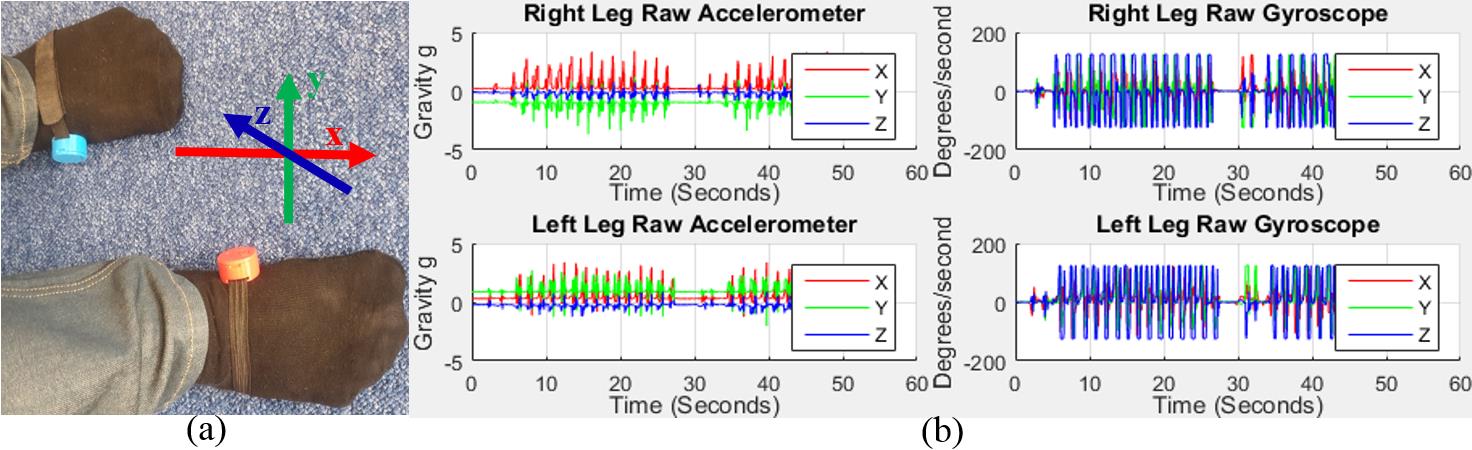
图2展示了双腿每一步幅的步态事件信息,包括足部首次触地(开始,紫色圆圈)、支撑相‐摆动相(SS)转换(青色三角形)以及摆动末期结束(黑色方块)。其中,支撑相信息由开始与SS之间的时间差提供,摆动相信息则由SS与结束之间的时间差提供。
速度和距离估计
采用梯形双积分法(27)利用加速度计数据获取用户运动的行进距离。第一次积分得到当前速度,第二次积分则计算速度并得出行进距离。输入数据通过高通滤波器以去除加速度信号的直流分量。我们提取特征的测量已通过Qualysis动作捕捉系统(25)验证。
数据与统计分析
从左右下肢分别获取十个时空步态参数的值,包括步长(米)、步时(秒)、步速(米/秒)、步幅长度(米)、步时(秒)、步幅速度(米/秒)、支撑时间(秒)、摆动长度(米)、摆动时间 (秒) 和摆动速度 (米/秒)。使用公式(1)到(5)计算每个参数的不对称因子SI (10)、SR (11)、Ia (12)、GA (13)和SA (14),并以相应的序列号(SL)标记。选择这些因子是因为它们是评估步态不对称性最常用的方法(28)。
SL1 ‐ 对称指数 (10) :
$$ SI(\%) = 100 \times \frac{|LeftLeg - RightLeg|}{0.5(LeftLeg + RightLeg)} $$
(1)
SL2 - SR(11):
$$ SR(\%) = 100 \times \frac{RightLeg}{LeftLeg} $$
(2)
SL3 - Ia(12):
$$ Ia(\%) = 100 \times \frac{|LeftLeg - RightLeg|}{\max(LeftLeg, RightLeg)} $$
(3)
SL4 - GA(3):
$$ GA = \ln \left( \frac{\max(LeftLeg, RightLeg)}{\min(LeftLeg, RightLeg)} \right) $$
(4)
SL5 ‐ 对称角 (14):
$$ SA(\%) = \frac{100^\circ}{90^\circ} \times |\arctan(\frac{RightLeg}{LeftLeg}) - 45^\circ| $$
(5)
SL1 基于行走过程中双腿运动学和动力学参数差异的百分比评估。SI=0表示无不对称性,SI ≥ 100% 表示高度不对称。SL2 表示最高值结果存在不对称性。SR=100表示无不对称性,SR > 100表示右腿值高于左腿,SR<100表示左腿值高于右腿。SL3 基于下肢运动学不对称性。Ia=0表示无不对称性。Ia = ±0,值越高表示不对称程度越高。SL4 基于步态不对称性的右腿与左腿比例的对数变换。GA=0和 GA=1分别表示无不对称性和最高不对称性。SL5 是根据离散步态参数的右值和左值绘制向量的角度计算出的对称角。SA 以百分比形式显示右腿与左腿比例的绝对值。SA=0表示无不对称性,SA≥100% 表示存在不对称性。
实验数据通过夏皮罗‐威尔克检验与正态分布进行比较。计算皮尔逊线性相关系数。分析实验结果与线性最小二乘回归之间的相关性。尽管现有的不对称因子SI (10)、SR (11)、Ia (12)、GA (13)和SA (14)能够提供步态不对称程度的数值指示,但这些指标对用户而言不易解释。它们依赖于复杂公式的计算以及对结果的解读知识,这可能影响使用的准确率。因此,为了方便地进行定量步态不对称监测,需要一种易于解释且经济实惠的步态对称可视化工具,以便在临床和家庭环境中使用。本文主要向用户展示步态不对称可视化,而不探讨步态不对称的原因。步态不对称的原因是未来研究的重要课题。
步态可视化
可视化特意展示单个受试者的结果,因为对20名受试者的聚合结果并无意义。所有受试者的个体化可视化均已估算。本节介绍四种新颖的步态不对称可视化方法,旨在展示步态对称性分析的各个方面,并使结果对患者(用于自主护理)和治疗师均具有可访问性和实用性:1)实时表盘可视化:旨在供患者使用,向其提供时空步态信息,使其能够识别并尝试纠正步态不对称;2)单腿时间变化可视化:旨在供治疗师评估步态,提供一系列步幅中时间不对称的整体情况。在正常人类步态中,从首次触地到摆动前期约占步态周期时间的60%,而摆动初期和摆动末期约占40%。该可视化方法使治疗师能够轻松识别与此60:40比例的任何偏差;3)双腿不对称性可视化:该可视化方法展示双腿的步幅和步长的时间和距离。由于是对双腿进行比较,因此两者应尽可能接近相等,任何差异即为不对称性;同时还能指示哪条腿受影响更严重,帮助治疗师重点关注异常程度最高的腿;4)基于箱线图的可视化:该可视化方法对上述结果进行总体概括,因此可用于监测治疗进展;5)综合所有特征的评估:一种使用普鲁克鲁斯特斯和欧几里得距离矩阵分析的步态评估系统,可提供简单、易于解释且准确率高、特征全面的步态评估。
1) 实时表盘可视化
步幅、步长和摆动信息被用于可视化。提取了步幅、支撑相、摆动相和步长特征。支撑相是步态周期中的静止阶段,该阶段行进的距离为零。首先估计每个特征的最大值(max)、最小值(min)和置信区间(CI)。从θ=0到2π绘制一个持续时间0.01的圆,使用。区间定义为α=50 ,每个步长增量(δ)通过计算得出。区间角度ω使用并以λ=1.25进行估算。刻度从0到α使用表示,对应于n= 0到α。然后使用绘制小刻度线。 刻度的最小值和最大值分别为下限置信区间和上限置信区间。随后,指示线(β)根据左右值之间的瞬时差异设定
$$ x = \cos(\theta), y = \sin(\theta) $$
$$ \delta = \frac{(max - min)}{\alpha} $$
$$ \omega = \frac{\pi * \lambda}{\alpha} $$
$$ \gamma = \frac{\pi * \lambda}{n} * i - \pi * \lambda + \pi $$
$$ x = \cos(\gamma), y = \sin(\gamma) $$
特征 (η) 使用 $$ \beta = \frac{\pi * \lambda}{\delta} * (η - min) - \pi * \lambda + \pi $$。指示线从 0 绘制到 β。绘制渐变颜色以使其外观丰富多彩。每个表盘底部通过七段显示器显示瞬时特征值。同样地,使用步幅、步长和摆动相信息来显示瞬时距离和时间。
首次运行应用程序时,可以选择输入最近完成的步幅数量。默认值设置为30。随后,它将检测相位并在表盘上显示相应信息。每次启动时,它会恢复上次计算的置信区间用于缩放,并在每30步或指定数量的步幅后自动更新。可以选择根据对称指数(10)、对称比率(11)、Ia(12)、步态不对称指数(13)和对称角(14)格式更改缩放因子。
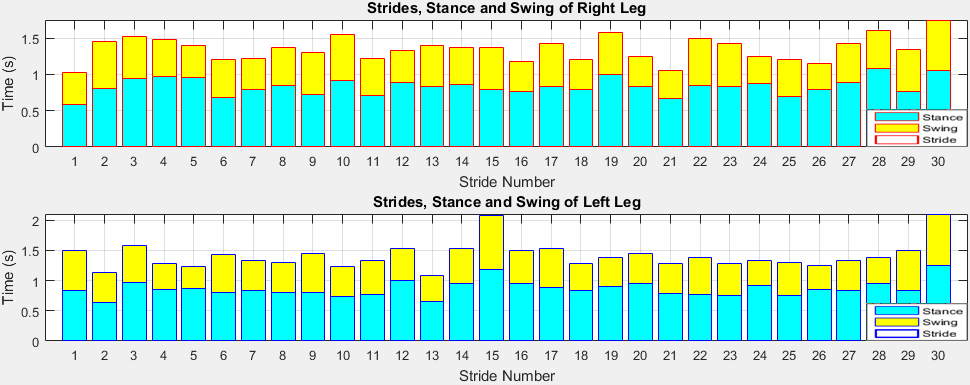
2) 单腿时间变化可视化
每个步幅由支撑相和摆动相组成。步幅时间由支撑时间和摆动时间构成。为了可视化各个腿部的变异度,估计每个特征的最大值和最小值。使用蓝色绘制一个轮廓矩形,朝向垂直线以表示第一个步幅值的右侧,其宽高比对应最大值。在该步幅矩形上用青色绘制支撑时间的矩形,并在支撑矩形顶部用黄色绘制摆动时间的矩形。所有矩形均遵循与最大值相对应的宽高比。此过程对所有存储的步幅依次进行。
3) 双腿不对称性可视化
每个步幅和步长特征都包含距离和时间信息。首先计算特征的最大值和最小值。绘制一个红色矩形,其高度为第一个右步幅距离,宽高比为最大值的比例。在右侧矩形旁边绘制一个蓝色矩形,其高度为左步幅距离。我们按照此方法,结合最大值的宽高比,对所有存储的步幅的步幅和步态不对称可视化进行处理。
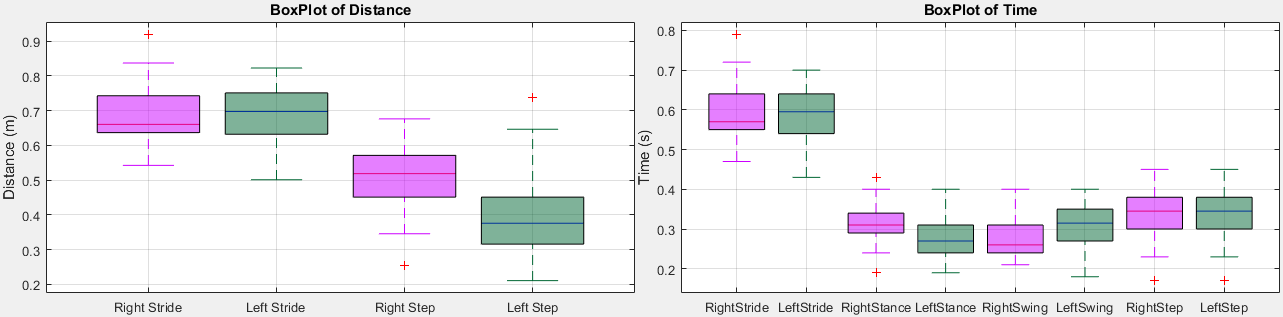
4) 基于箱线图的可视化
中位数、上四分位数、下四分位数和须值由特征估计得出,并绘制箱线图。这是一种简单的描述性统计表示方法,用于理解每个特征的分布、非正态/异常水平、异常值、对称性以及整体步态不对称信息。
5) 综合所有特征的评估
为了量化和比较步态,一种常用的方法是在时间和长度上对提取的步态特征所形成的形状进行对齐。从左右腿提取的八个步态特征(步幅长度、步幅时间、步幅速度、步长、步时、步速、支撑时间、摆动长度、摆动时间和摆动速度)被转换到图3所示的笛卡尔坐标系中。x轴和y轴分别表示右腿和左腿的特征,数值为无量纲数。所有个体受试者的八个特征被绘制成点,并将这些点依次连接形成一个形状。普氏分析(一种用于分析一组形状分布的统计分析方法)在数学和统计框架下描述曲线形状及形状变化,独立于时间和尺寸因素。通过普鲁克鲁斯特斯叠加法估计出标准正态均值步态形状(NMGS)。然后将每个步态形状转换以寻找与NMGS的最佳匹配。采用欧几里得距离矩阵分析(EDMA)来分析每个特征的影响。随后估算各个个体特征的异常程度,并绘制结果以可视化该特征(29)。
结果
一名受试者的初步实验结果:基于从双脚采集的加速度计和陀螺仪数据提取自动步态不对称特征。
步态特征信息
行进33.38米所用的总时间为22.21秒。估计的双腿行进距离分别为33.35米和32.87米,准确率分别为99.92%和98.48%。实际距离与估计距离非常接近。准确率步幅和步态事件检测为100%。表1显示了使用五种技术测得的平均步态变异性及量化步态不对称结果。
| 步态特征 | 右腿 Mean | 右腿 95%置信区间 | 左腿 Mean | 左腿 95%置信区间 | SL1 SI | SL2 SR | SL3 Ia | SL4 GA | SL5 SA |
|---|---|---|---|---|---|---|---|---|---|
| 步长(米) | 1.112 | 0.225 | 1.096 | 0.230 | 1.45 | 101.46 | -1.44 | 0.01 | 0.46 |
| 步幅时间(秒) | 0.595 | 0.027 | 0.588 | 0.026 | 1.13 | 101.13 | -1.12 | 0.01 | 0.36 |
| 步幅速度(米/秒) | 1.823 | 0.308 | 1.855 | 0.371 | -1.73 | 98.29 | 1.71 | 0.02 | -0.55 |
| 步幅长度(米) | 0.507 | 0.041 | 0.387 | 0.043 | 26.68 | 130.79 | -23.54 | 0.27 | 8.44 |
| 步幅时间(秒) | 0.258 | 0.028 | 0.337 | 0.027 | -26.58 | 76.53 | 23.47 | 0.27 | -8.41 |
| 步幅速度(米/秒) | 2.185 | 0.337 | 1.256 | 0.223 | 53.98 | 173.94 | -42.51 | 0.55 | 16.78 |
| 支撑时间(秒) | 0.315 | 0.018 | 0.278 | 0.021 | 12.36 | 113.17 | -11.64 | 0.12 | 3.93 |
| 摆动长度(米) | 1.009 | 0.202 | 0.990 | 0.207 | 1.88 | 101.90 | -1.86 | 0.02 | 0.60 |
| 摆动时间 (秒) | 0.280 | 0.019 | 0.310 | 0.021 | -10.18 | 90.31 | 9.69 | 0.10 | -3.24 |
| 摆动速度 (米/秒) | 1.729 | 0.248 | 1.537 | 0.248 | 11.79 | 112.53 | -11.13 | 0.12 | 3.75 |
表1: 步态变异性与不对称因素(SI, SR, Ia, GA 和 SA) 表1显示,双腿的步幅长度和时间均值非常接近。然而,步长、时间和速度方面表现出较高的不对称性。估计的不对称因子显示出在特征和指标之间均存在差异的数值。最低的步态不对称性出现在步幅阶段,而最高的不对称性出现在步态事件期间。通过夏皮罗‐威尔克检验,20名参与者的大多数参数呈现正态分布。此外,大多数参数的置信区间最小,表明数据具有一致性。
对SL1、SL2、SL3、SL4和SL5因子之间的皮尔逊线性相关系数进行分析,结果表明除SL4外大多数情况下存在极强的相关性(p<0.001)。因此,在评估指示高对称性因子的对称性时,分析各个因子结果的兼容性更具意义。系数排序秩在大多数情况下也保持一致。线性最小二乘回归显示了极高的相关性。在临床实践中,评估导致高步态对称性的各个因子的影响非常重要,而这些数值的解释所提供的信息有限。因此,对这些数值进行可视化表示并加以解释将提供更加用户友好的信息。
步态可视化
接下来,展示四种步态不对称可视化的结果。
1) 实时表盘可视化
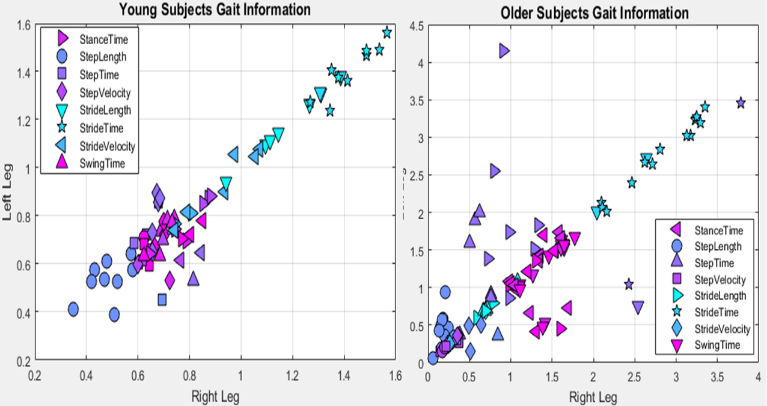
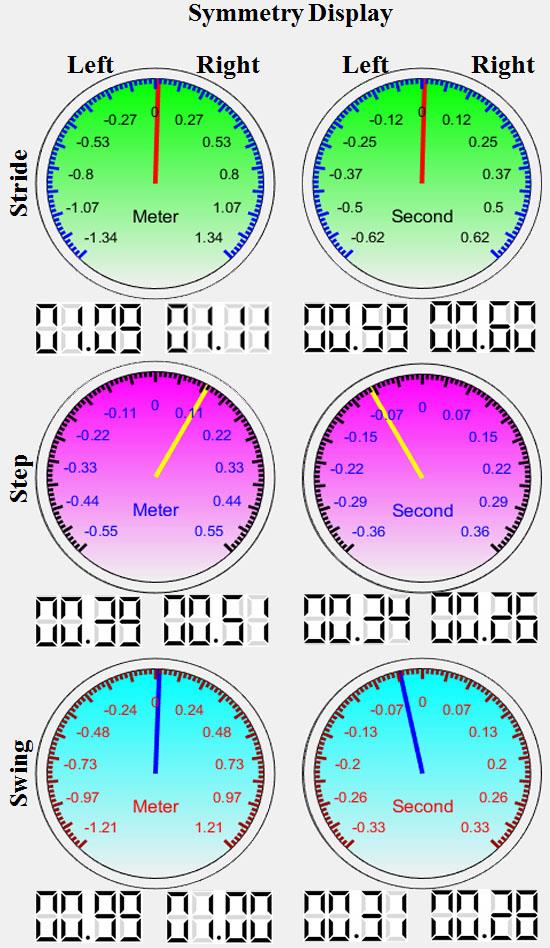
图4以表盘形式展示了一名受试者的时空测量结果。理论上,双腿应给出相同的结果,因此完全对称时表盘指示读数应为零。第一个表盘是步幅长度和时间的双侧下肢不对称显示。第二个表盘显示步长和时间的实时测量值。需要注意的是,不对称程度存在差异。第三个表盘显示摆动相距离和时间。同样,双腿之间的不对称性较小。三个表盘上的刻度代表置信区间,指针表示双腿之间的瞬时实时差异。例如,在此情况下,尽管步幅和摆动相的表盘显示接近完美的对称性,但与步相关的测量则不然。步态测量包含距离和时间的信息。距离表盘显示右腿行走距离更长(0.51米),而左腿为(0.39米)。因此,患者需要缩短右腿行走的距离和/或加长左步。时间表盘显示右腿用更短的时间(0.26秒)完成了更长距离的移动,而左腿用时较长(0.34秒)。表盘下方的数字显示三个标记的绝对测量值。
2) 单腿时间变化可视化
执行了30个步幅,并在图5中展示了步幅时间、支撑相和摆动相的时间,其中每个条形表示步幅时间。
青色和黄色分别代表支撑相和摆动相的时间。支撑相和摆动相的时间具有较小的变异度。该可视化清晰地展示了每一步幅中双腿支撑相和摆动相的变异性。平均步幅的支撑相与摆动相的比例最接近60:40%分割,相关数据见图5。
3) 双腿不对称性可视化
在此可视化中,图6展示了双腿在时间和距离上的步幅和步长不对称性信息。我们观察到,尽管步幅的对称性较好,但步相位存在显著的变异度。
4) 基于箱线图的可视化
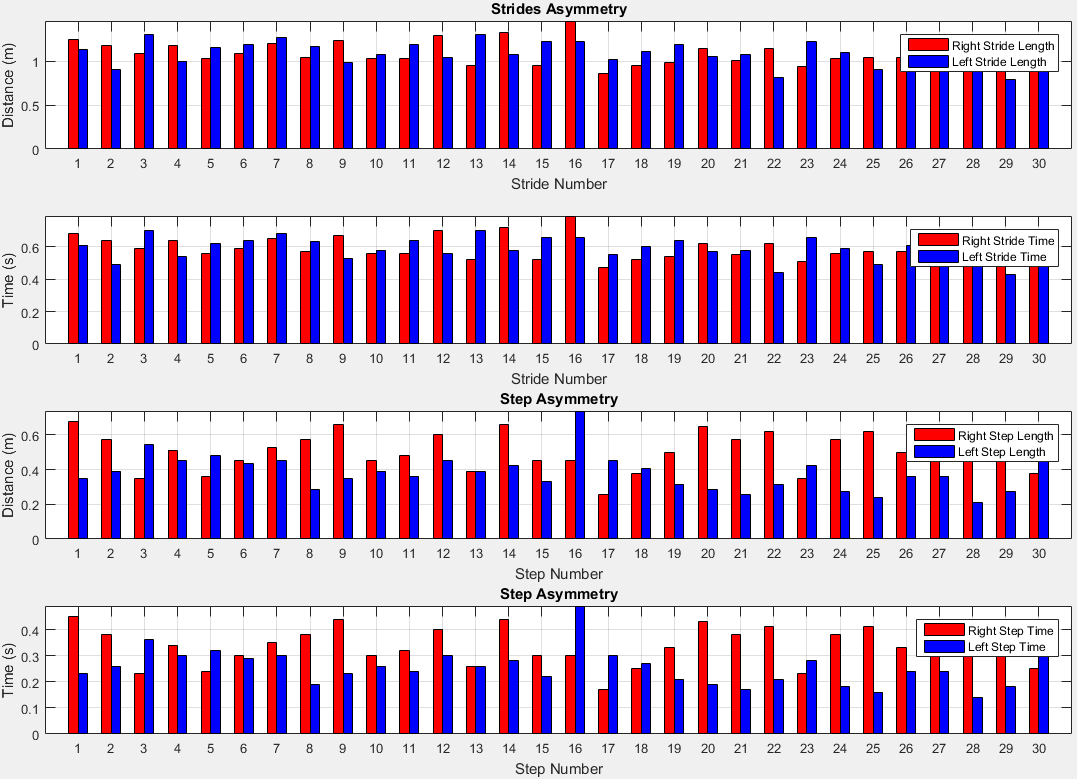
图7展示了双腿步幅和步长的均值在个体因素上的分布箱线图。箱线图中标识了四分位距,显示步幅的变异度较低。第一个箱线图显示左腿的步长变异度高于右腿。这表明尽管左右两侧的步幅长度相似,但步长可能存在更大的变异度。时间的箱线图表明双腿的变异度均较低。如果排除在走廊上行走时的第一次和最后一次步幅,则不对称性并不显著。这些阶段由于初始加速度和结束时的动量而具有更多的变异度。需要注意的是,箱线图所标识的观察值并不特别极端。
5) 综合所有特征的评估
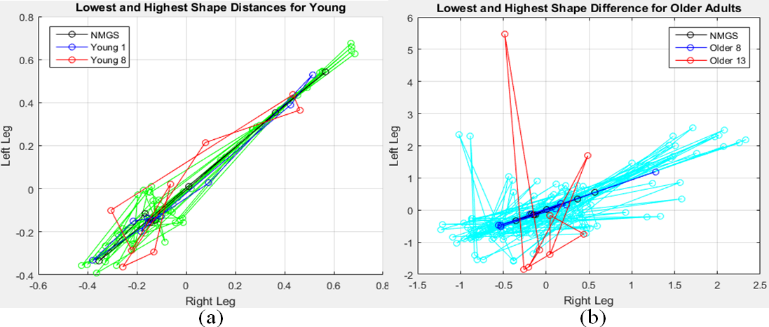
步态特征用于构建个体步态的形状,以表征个人的步态。在步态接近对称的正常情况下,由于右侧提取的特征与左侧大致相同,该形状应处于45°角度。通过平移和旋转,采用普氏分析对从10名年轻受试者中提取的所有步态特征形状进行最佳拟合,所有最佳拟合形状的均值被视为正常平均步态形状(NMGS)。
 年轻人和 (b) 老年受试者中最明显的形状差异)
年轻人和 (b) 老年受试者中最明显的形状差异)
在图8(a)中,年轻8号的变异度最高,年轻1号的变异度最低,且两位受试者的步态形态存在明显差异。类似地,在图8(b)中,老年13号的变异度最高,老年8号的变异度最低。这种个体间不同的形态源于所提取特征值的差异。例如,年轻8号的高变异度主要由行走距离和时间特征引起。老年受试者也发现了类似的结果。这些形态差异具有临床意义,例如老年13号曾中风,导致右腿麻木,行走时使用拐杖,且无法移动右腿,因此行走过程中的大部分动作由左腿完成,同时依靠拐杖维持身体平衡。尽管上述分析能够捕捉到异常情况,但对异常进行量化尤为重要,这对于监测疾病进展以及评估治疗后的改善情况都具有重要意义。
为此,采用欧氏距离均值分析(EDMA)来定位导致异常的步态特征。通过10名年轻受试者的数据估计出平均形态,并据此计算特征间距离,即各个特征彼此之间的距离。(29)。随后在平均形态与所有步态形态之间估计形态差异矩阵。图9(a)中,老年13号的值最高,为19.82,表明该患者的方差最大。
讨论
本文描述了五种用于分析步态的可视化方法。所提出的方法通过开发一种新的视觉展示步态信息的方式,并以更科学的方法进行分析,从而丰富了现有文献,显著改进了当前的临床观察方法。该方法学能够将步态周期分解为其各个组成部分,从而提高分析的可靠性。在生物识别技术和生物医学工程领域,步态分析已被用于表征人体运动,并具有多种应用(30)。这五种步态方法各自具有独特的优点。实时表盘可视化利用表盘和指示器展示了每个步态周期中双腿在步幅、步长及摆动相的距离和时间方面的瞬时步态参数;同时还通过七段显示器显示步幅、步长和摆动相的瞬时距离与时间数值。单腿变异可视化展示了步幅、支撑相和摆动相在时间上的变异度。双腿不对称可视化展示了双腿在步幅和步长方面的不对称性。基于箱线图的可视化展示了步幅、步长、支撑相和摆动相的整体分布情况。在最后一种可视化方法中,我们开发了一种整体的基于普氏分析的形状,将所有个体特征整合为一个代表个体步态的模式,并通过欧氏距离均值分析(EDMA)对其进行量化,从而实现对每个个体特征异常程度的量化。这些方法用户友好、易于解释,有望帮助专业人员检测和解释步态不对称性。
该研究存在一些局限性。收集手势数据并以图形表示来描绘这一数据的想法并非新颖,此前已有应用,例如手势(18, 19)、运动手势(20)、手持设备设备(21)和复杂活动(22)。然而,据我们所知,这是首次使用该方法学进行基于多惯性测量单元同步数据的实时步态分析的实验之一。开发上述技术所使用的患者数量相对较少,提取的数据尚不足以最终确定年轻人和老年受试者步态的正常值。本研究标志着一个发展过程的开始,但证明了此类技术的有效性并具备实际应用价值。未来仍需进一步工作,主要涉及在更多人群和患者中测试该技术,以确定正常值,同时也需评估异常步态患者的结果。此外,需要开发可集成传感器技术的硬件,并研制适用于临床应用的产品。同时,还需简化数据解释过程,以便治疗师甚至患者能够更好地理解数据,从而提高此类设备的临床影响力。
我们相信,这项技术有潜力使步态分析更加普及,并推动步态分析领域的数字化转型,为步态障碍患者的诊断和治疗开辟新的前景。所使用的惯性测量单元传感器是可穿戴且便携式的,可在不同的临床环境以及患者家中使用,且不依赖复杂的设备。这具有重大进步的潜力。由于步态不对称性已被证明是中风(31)、下肢截肢(32)、骨关节炎(33)和脑瘫(34)等多种疾病患者康复的决定因素,此类设备可能在这些患者的评估中发挥作用。它还可用于骨科和康复中的患者进展监测(4)。在运动训练中也有潜在应用,跑步时尽可能接近零不对称性可能会提升运动员表现(35)。我们提出的基于实时表盘的可视化工具提供了一种简单且用户友好的方式来可视化和监测步态不对称性。因此,我们提出的步态信息可视化方法可用于家庭和诊所中的多种应用,用于步态监测和康复。这有潜力使步态不对称性分析得到更广泛的应用。
结论
由于基于实验室的客观步态分析金标准尚未广泛普及,对存在步态异常患者的常规评估依赖于临床验证测试。这些测试依靠经过培训的观察者以主观方式解释观察值,常导致在不同观察者之间甚至同一观察者内部的解释出现显著变异度。因此,迫切需要开发新技术,使客观步态分析能够更广泛地用于临床应用。本研究开发了五种不同的可视化方法,提供全面的步态评估:实时可视化;单腿时间变化可视化;双腿不对称性可视化;基于箱线图的可视化以及综合所有特征的评估。该系统具有便携式、舒适且用户友好的特点,有望推动结构性变革,助力实现步态分析领域的数字化转型战略。本研究为未来的发展奠定了基础。事实上,未来的挑战十分重大。我们需要进一步优化技术,使其更加用户友好;需要尽量减少操作人员使用设备所需的培训,从而提高使用机会。这可以通过开发智能的、可能是自动化的信息解释功能来实现。但最重要的是,这项技术必须融入数字化转型体系的核心,才能真正使临床医生以符合未来医疗需求的创新方式为其患者提供临床护理。

















 1654
1654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









