



自动驾驶中的最优控制
1 奥迪自动驾驶杯
如今,自动驾驶是一个非常前沿的课题。在过去几十年中,尽管已经开展了大量的研究与开发工作,但仍有许多问题尚未解决。实现完全自动驾驶汽车的梦想需要具备新思维的年轻专业人才。本着这一精神,奥迪自动驾驶杯(AADC)为工程学、计算机科学、数学及相关领域的学生提供了机会,开发能够自主控制汽车的软件系统及相应算法,并在提供的仿真环境中进行测试。该竞赛重点关注城市区域内的驾驶场景,因此所开发的软件不仅需要具备车道跟踪、障碍物感知与避让能力,还需完成更复杂的操作,例如转向、停车或通过斑马线。为实现上述目标,每个学生团队都将获得微型车辆(比例1:8),这些车辆配备了RGB和深度摄像头、超声波传感器、转速计以及处理单元等设备。有关AADC的更多信息或微型车辆的硬件规格,请参见[1]或[2],[3],[4]。
接下来的章节将解释我们泊车操作软件的关键方面。这包括图像处理方法用于检测的ds以及基于单轨模型的最优控制理论来计算相应的轨迹。
2 进入和驶出停车位
在比赛过程中,一个外部信号会启动对下一个空闲停车位的搜索。此时,停车位的位置未知,需要通过RGB和深度相机进行检测。随后将执行一条时间最优轨迹以进入该停车位。
2.1 图像处理
由于提供了停车位的几何信息,因此可以通过比较RGB图像中的某些角点和边缘来识别它们。图1显示了车辆对两个停车位的视图,其中后者已被占用。
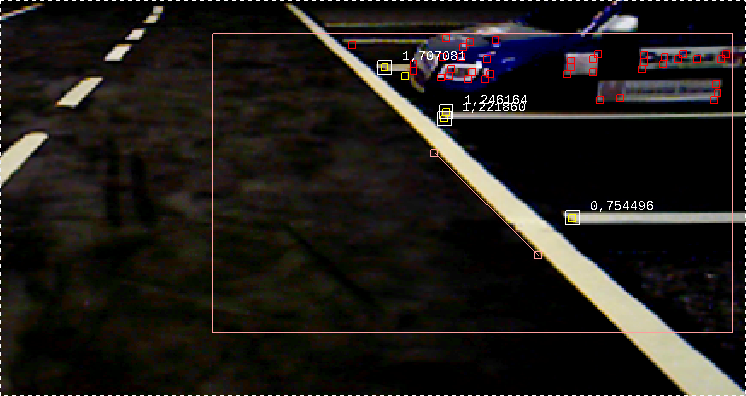
图像处理流程可以描述如下:给定一个特定的兴趣区域,首先进行预处理,包括灰度转换、阈值处理以及中值滤波器的应用 [5]。该预处理结果随后由Harris角点检测算法 [6] 处理,以提取关键角点的像素。此外,车道跟踪模块通过霍夫变换 [5] 计算得到相邻车道的表示。利用深度相机的信息,我们可以通过评估角点的高度及其相对于相邻车道的位置来识别属于停车位的角点。
其他以及它们到车道和车辆的距离。每个检测到的空间是否为空由超声波传感器确定。上述图像处理算法由软件库OPENCV [7]提供。
2.2 最优控制
为了计算时间最优轨迹,必须定义车辆的动力学模型。对于泊车操作,采用运动学单轨模型[8],该模型将汽车视为两轮系统。车辆状态由z(t):=(x(t) y(t) vr(t) Ψ(t))>描述,其中 x、 y和 vr分别为(虚拟)单后轮的坐标及其速度。角度Ψ表示相对于固定参考系的旋转。由此,相应的动力学 f为
$$
f(z, u)=(vr \cos(\Psi), vr \sin(\Psi), a, \frac{vr}{L} \tan(\delta))^\top
$$
其中常数 L表示轴距。该系统由后轮的加速度 a和转向角 δ控制,我们将二者合并为 u(t):=(a(t) δ(t))>。对于动力学特性为 f的汽车,其最优控制问题是在最短时间 T内从初始状态 z0移动到停车位(用 zT表示),该问题可表述如下
$$
\begin{aligned}
&\text{minimize}
{u, T} & & T \
&\text{s.t.} & & \dot{z}(t) = f(z(t), u(t)), \
& & & z(0) = z_0, \
& & & z(T) = z_T, \
& & & u
{\min} \leq u(t) \leq u_{\max}, \
& & & v_{r,\min} \leq v_r(t) \leq v_{r,\max}, \
& & & C(u(t), z(t), t) \leq 0, \quad \forall t \in [0, T].
\end{aligned}
\quad \text{(OCP)}
$$
控制向量 u以及速度 vr受到边界约束的限制。为了方便起见,路径约束表示为 C,并确保在操作过程中不会碰撞相邻停车位中的其他车辆。
3 数值结果
在直接法中,最优控制问题(OCP)通过软件库TRANSWORHP [9]使用梯形法进行离散化。随后,由NLP求解器WORHP [10]求解所得到的非线性优化问题。图2和图3展示了该解所提供的进入路径以及相应的控制量。由于该轨迹被设计为时间最优,u仅取其边界值。因此,该轨迹可完全由对应的控制切换点描述,从而实现了控制量的非常简单的实现。整个操作的演示视频可在 https://goo.gl/cMGb1z 查看。

















 5741
5741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









