




 在执行RGBD SLAM的g2o_viewer时遇到错误:'libg2o_viewer.so: cannot open shared object file: No such file or directory'。原因是系统未找到源码安装的g2o库。解决方法是将'/usr/local/lib'添加到'/etc/ld.so.conf',然后执行'ldconfig'更新缓存。按照此步骤操作后,g2o_viewer能正常运行。
在执行RGBD SLAM的g2o_viewer时遇到错误:'libg2o_viewer.so: cannot open shared object file: No such file or directory'。原因是系统未找到源码安装的g2o库。解决方法是将'/usr/local/lib'添加到'/etc/ld.so.conf',然后执行'ldconfig'更新缓存。按照此步骤操作后,g2o_viewer能正常运行。
在高翔的“一起做RGB-D SLAM”中, 安装好了g2o 和 g2o_viewer,但是在运行的生成的result_after.g2o文件的时候,报错显示:
error while loading shared libraries: libg2o_viewer.so: cannot open shared object file: No such file or directory
经查找,问题在于默认情况下,编译器只会使用/lib和/usr/lib这两个目录下的库文件,而经过源码安装的g2o的库是在 /usr/local/lib 路径下,因此虽然安装了源码包,但是使用时仍然找不到相关的.so库,就会报错。所以想解决这个问题,就需要把 /usr/local/lib 添加到 /etc/ld.so.conf 中,具体方法如下:
1、打开终端 输入如下命令:
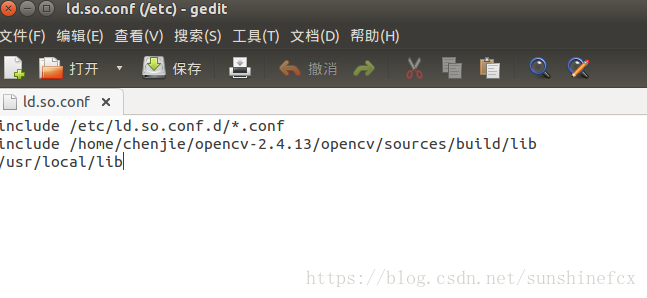
sudo gedit /etc/ld.so.conf在打开的 /etc/ld.so.conf 文件的下面写上 /usr/local/lib ,点击保存即可,如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2274
2274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









