



论文标题:
NGM-SLAM: Gaussian Splatting SLAM with Radiance Field Submap
论文作者:
Mingrui Li, Jingwei Huang, Lei Sun Aaron, Xuxiang Tian, Tianchen Deng, Hongyu Wang
导读:
3DGS技术因其性能卓越而备受关注,3DGS-SLAM系统应运而生。然而,当前3DGS-SLAM系统通常在大场景表示、有效的闭环校正和场景泛化能力方面存在缺陷。为此,论文作者设计了NGM-SLAM,这是第一个利用神经辐射场子图用于渐进式场景表示的GS-SLAM系统,有效地结合了神经辐射场和3DGS的优势,实现了最先进的场景重建和跟踪性能。©️【深蓝AI】编译
1. 背景简介
长期以来,SLAM技术一直是机器人学与AR/VR领域的核心议题。密集SLAM系统因广泛的应用潜力而备受重视。传统密集SLAM系统利用体素、点云和TSDF等显式表示,在追踪方面表现出色,但受限于高保真建模、空缺填补及纹理细节的处理,其应用范围受到一定局限。神经隐式SLAM系统,基于NERF的隐式表示,显著增强了SLAM系统的感知能力,但依旧面临实时性、运行速度和内存需求的瓶颈。
近期,3DGS-SLAM系统在保持NERF-SLAM系统的建图精度同时,在渲染速度和精度上取得了突破,挑战了神经隐式 SLAM 在密集重建中的主导地位。然而,值得注意的是,与NERF相比,3DGS-SLAM系统依赖点云输入,在空缺填补能力上有所欠缺,且未充分利用神经网络的泛化能力。此外,它缺乏稳健的闭环检测机制,导致在大场景中累积漂移问题凸显,影响了地图的稳定性和准确性。
2. 方案提出
针对上述挑战,作者创新性地设计了融合神经子图与3DGS表示的SLAM体系。
首先,构建以神经辐射场为基础的子图与一个全局关键帧索引。当达到地图构建阈值时,基于前序子图作为先验,将会创建新的神经子图,并实施高斯渲染。随后,执行局部捆绑调整(BA),并在子图间实施融合策略及高斯体修剪。闭环一旦被识别,即刻启用实时由粗到细的闭环校正,通过调整对应锚框的地图姿态,并运用全局BA及高斯渲染损失函数,以最小的计算成本有效修正累积漂移。
实验结果表明,本方法在跟踪和建图方面实现了SOTA性能,并且可扩展到大规模场景。
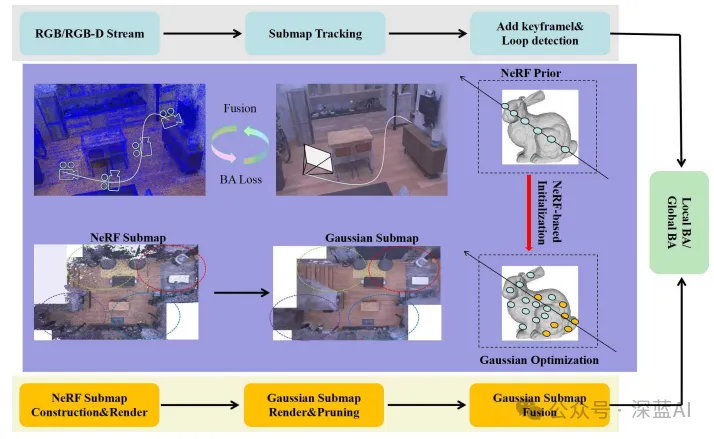
▲图1|NGM-SLAM系统架构©️【深蓝AI】编译
3. 细节解析
图1展示了NGM-SLAM的系统架构。该系统包括跟踪和建图两个模块。在初始子图开始建立后,跟踪模块持续估计相机姿态并检测环路,同时将子图的关键帧传递给建图模块。建图模块首先构造神经子图,该神经子图也用作多尺度GS(高斯抛雪球)子图的先验,并在子图之间执行并行渲染。在子图内执行局部束缚调整(BA)以校正姿态和建图误差,一旦检测到闭环,就对所有锚框执行全局BA。最后,生成的GS地图被缝合在一起。
■3.1 先验神经子图渲染
考虑到3DGS-SLAM系统在泛化推理能力上的不足,本文引入了基于数据驱动的增量神经子图作为基础监督机制,来填补空白并增强地图表示。基于ORB特征点追踪,仅在当前帧提取特征,减少了与子图创建和空缺填充相关的漂移问题。通过设立局部与全局关键帧列表,优化了局部与全局BA流程,并在子图积累至预设关键帧阈值时新建局部子图。为优化地图融合并减少融合误差,借助DBOW模型评估关键帧间的共视关系,确保地图结构的稳定性。
■3.2 多尺度高斯子图渲染
利用神经子图提供的先验信息,采用一组各向异性3DGS分布来描绘场景,利用位置、不透明度、三阶球谐系数、3D尺度及四元数描述的3D旋转来丰富场景细节。通过多尺度渲染技术,解决了小高斯体渲染中的锯齿问题,通过不同分辨率下的高斯体聚合,提高了渲染质量,同时在保证渲染速度的前提下,通过射线引导的高斯体修剪策略进一步提升了精度与效率。
■3.3 高效子图融合策略
为适应大规模场景并有效管理内存资源,本文提出了一套高效的子图融合机制。场景被划分为多个局部子图,每个子图依据关键帧的空间位置进行定位。在每次局部BA后,地图的中心姿态得到更新,以确保子图间的良好对齐。为了避免子图边界处出现视觉上的重叠或缝隙,从每个子图的边缘剔除了多余的高斯体,从而减轻了拼接时可能出现的伪影现象。接下来,采用高斯聚合技术,将相邻子图边界的较小高斯体合并为更大的单元,以实现无缝过渡。这一系列操作确保了子图间的平滑拼接,即使在多次闭环校正和全局BA之后,也能维持地图的一致性和完整性,同时控制了内存占用的增长。
■3.4 闭环检测与全局优化
闭环检测是确保地图整体一致性的关键步骤。采用局部与全局相结合的策略,首先在每个子图内部进行局部BA,专注于局部关键帧的校正。对于全局一致性,利用词袋模型(BoW)来检测全局关键帧之间的关联性,一旦发现闭环条件满足,即启动一个由粗到精的全局调整流程。这一过程首先通过BA优化锚定子图的姿态,接着执行子图融合,以消除边界漂移。在此之后,保持锚定子图姿态固定,基于全局关键帧列表执行全局BA,进一步细化姿态调整,并再次进行子图融合,以最终完成闭环校正。通过在整个过程中整合射线采样,能够指导高斯体的生成与融合,进而利用高斯渲染损失进一步细化地图,确保了全局地图的一致性和准确性,同时保持了系统的实时性。
4. 实验
实验结果表明,与现有基于3DGS的SLAM方法相比,本方法在多个维度上实现了显著提升,不仅提高了跟踪和建图的精度,还优化了系统运行效率,特别是在处理大规模多房间序列时展现了其优越性能。
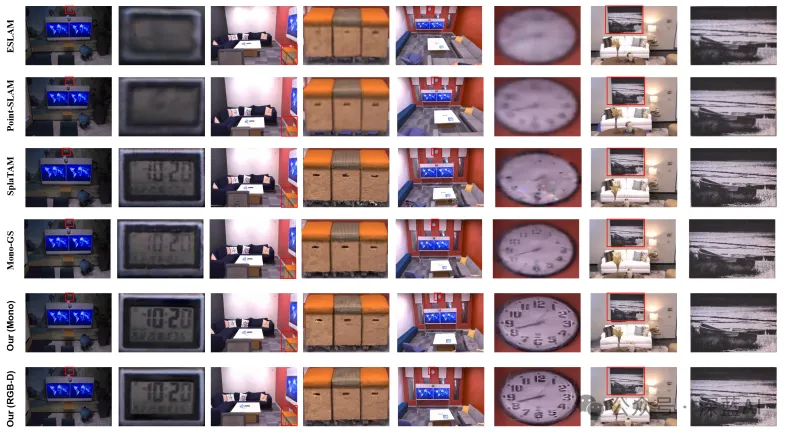
▲图2|展示了在Replica数据集房间序列上,单目与RGB-D重建技术的对比结果©️【深蓝AI】编译

▲图3|展示了在Replica数据集四个大型公寓序列上的重建结果,证明了本方法有效避免了灾难性遗忘,并且能够实现背景的合理填充及场景的广泛适应性©️【深蓝AI】编译

▲图4|在ScanNet数据集的大规模多房间序列上,本方法展现了其在累积误差校正方面,相较于传统基于高斯抛雪球的方法有着更优的表现©️【深蓝AI】编译
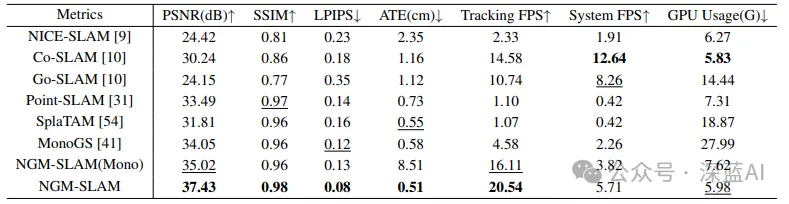
▲表1|在Replica数据集的8个小房间序列上,本方法在平均PSNR(dB)、SSIM、LPIPS、ATE(cm)、跟踪FPS、系统FPS和GPU使用情况等方面的表现©️【深蓝AI】编译
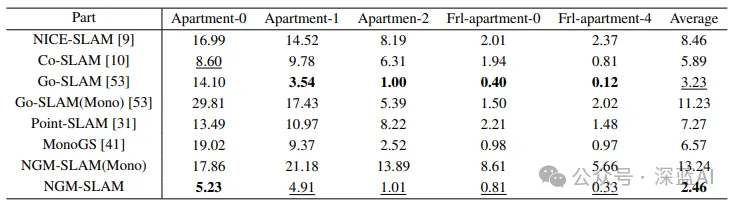
▲表2|在Replica数据集的5个大规模场景序列上,本方法在ATE RMSE(cm)性能方面的表现©️【深蓝AI】编译
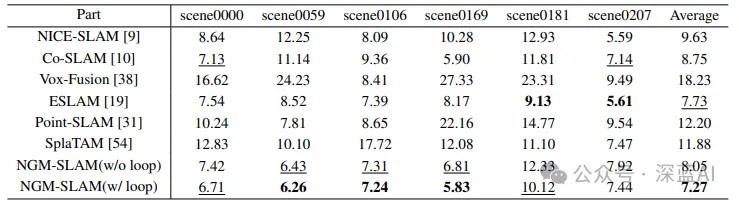
▲表3|在ScanNet数据集的6个大规模场景序列上,本方法在ATE RMSE(cm)性能方面的表现©️【深蓝AI】编译
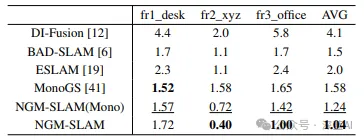
▲表4|在TUM RGB-D数据集上,本方法在ATE RMSE(cm)性能方面的表现©️【深蓝AI】编译
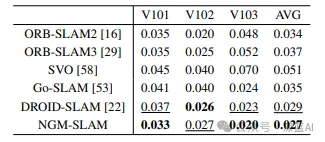
▲表5|在EuRoC数据集上,使用立体视觉相机输入时,本方法在ATE RMSE(cm)性能方面的表现©️【深蓝AI】编译
5. 总结
总的来说,作者提出的NGM-SLAM系统成功地将神经辐射场的表达力与3DGS的高效渲染能力相结合,通过创新性的子图管理和闭环检测策略,克服了大场景建图和实时性要求的挑战,并以其稳健的跟踪性能和监督精度,展现出广泛的应用前景,这无疑将开启一股融合NeRF与3DGS技术的SLAM系统研究新浪潮。
编译|Deep蓝同学
审核|Los
移步公众号【深蓝AI】,第一时间获取自动驾驶、人工智能与机器人行业最新最前沿论文和科技动态。

















 1345
1345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









