



1、Pycharm 安装(无需java环境配置)
- 下载网址:https://www.jetbrains.com/pycharm/download/?section=linux
- 下载ARM64版本的
- 开始安装:
- cd pycharm-community-2023.2.3-aarch64/pycharm-community-2023.2.3/bin
- sh ./pycharm.sh
- 按照提示选择即可
- 桌面快捷方式创建:
- gedit pycharm.desktop
- 添加以下内容
[Desktop Entry]
Type=Application
Name=Pycharm
GenericName=Pycharm3
Comment=Pycharm3:The Python IDE
Exec="/home/xxx/pycharm-community-2023.2.3-aarch64/pycharm-community-2023.2.3/bin/pycharm.sh" %f
Icon=/home/xxx/pycharm-community-2023.2.3-aarch64/pycharm-community-2023.2.3/bin/pycharm.png
Terminal=pycharm
Categories=Pycharm; - 更改pycharm.desktop文件属性,使其允许作为程序执行文件
- pycharm 添加conda环境 进入pycharm环境设置

- 后续就是个人习惯设置啦
2、D435i SDK 安装
主要下载链接:
Release Intel® RealSense™ SDK 2.0 (v2.49.0) · IntelRealSense/librealsense · GitHub
3、python3.6设置
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.6 1
参考链接:【精选】Jetson Nano配置踩坑全记录_apt-utils没有安装-优快云博客
4、realsense SDK 安装
安装的是2.49.0版本,在运行buildLibrealsense.sh前,先按照参考链接将版本检测代码注释,具体位置在103-114行。
安装完成后,生成的是基于python3.9的动态库,使用python3.6的环境无法调用(也不知道是不所我没有设置对路径,然后重新装。)
首先将SDK文件删除,然后按照标题5的步骤将涉及到的安装文件进行删除。
再次安装时,将buildLibrealsense.sh文件中的137行,增加一句
-DPYTHON_EXECUTABLE=/usr/bin/python3.6
指定为该python3.6。然后按照上面链接,继续完成安装,编译完成后。
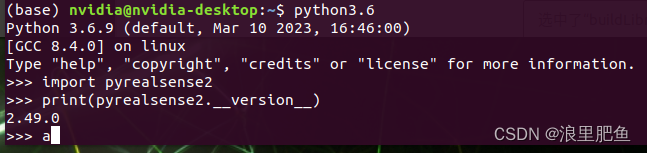
sudo gedit ~/.bashrc 将路径添加
export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python3.6/pyrealsense2
source ~/.bashrc,然后就可以啦。
5、realsense SDK 卸载 (基于上一步的安装)
- sudo apt-get purge librealsense2*
- sudo rm -rf /usr/local/lib/librealsense*
- sudo rm -rf /usr/local/lib/pyback*
- sudo rm -rf /usr/local/lib/pyreals*
- sudo rm -rf /usr/local/lib/python3.6/pyreals*
- sudo rm -rf /usr/local/lib/python3.6/pyback*
- sudo rm -rf /usr/local/include/librealsense*
- sudo apt-get remove librealsense2-utils
- sudo apt-get remove librealsense2-dev
- sudo apt-get remove librealsense2-dkms
- sudo rm -rf /usr/local/bin/realsense*
- sudo rm -rf /usr/local/bin/rs-hello-re*
- sudo rm -rf /usr/local/lib/cmake/realsense2*
- sudo rm -rf /usr/local/lib/cmake/pyrealsense2*
- sudo rm -rf /usr/local/lib/pkgconfig/realsense2*
- sudo rm -rf /etc/udev/rules.d/99-realsense*
- sudo rm -rf /usr/local/lib/python3.9/pyrealsense*
- sudo rm -rf /var/cache/apt/archives/librealsense*
- sudo rm -rf /var/lib/apt/lists/librealsense*
- sudo gedit ~/.bashrc #(删除相关realsense path)
6、D453i 相关参数
-
imu Bosch BMI055(参考连接:Inertial Measurement Unit BMI055 | Bosch Sensortec (bosch-sensortec.com))
7、安装方法二(Jetson AGX Orin)
- 下载SDK:git clone https://github.com/IntelRealSense/librealsense.git
- 安装依赖包:
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev -
Realsense D455相机在Jetson AGX Orin上的配置过程_agx orin realsense peizhi-优快云博客


















 1407
1407

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









