







1、刷机完成后开始环境配置
- 基本环境配置:
- sudo apt-get update
- sudo apt-get install nvidia-jetpack
- sudo apt-get install python3-pip
2、设置SSD启动
- 首先讲SSD格式化(Disk工具)
- df -h (检查是否存在该硬盘分区)
- 使用 rootOnNVME工具 ( 参考链接Jetson Xavier NX – 从 SSD 运行_jetson nx ssd_AI边缘计算服务器_图为科技的博客-优快云博客)
- sudo reboot
3、CUDA环境配置
- sudo gedit ~/.bashrc
- export CUDA_HOME=/usr/local/cuda
- export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
- export PATH=/usr/local/cuda/bin:$PATH
- source ~/.bashrc
- nvcc -V #查看版本
4、pip安装及换源
- sudo apt-get install python-pip
- pip install --upgrade pip
- sudo apt-get install python3-pip
- pip3 install --upgrade pip
- # pip 换源
- mkdir ~/.pip
- vim ~/.pip/pip.conf
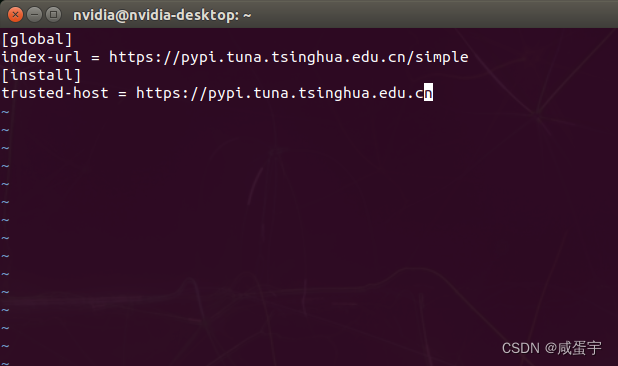
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple
[install]
trusted-host = https://pypi.tuna.tsinghua.edu.cn
5、jtop安装
- sudo -H pip install jetson-stats
- sudo jtop
6、系统自带opencv不支持cuda加速,卸载重装
- sudo apt purge libopencv*
- sudo apt autoremove
- sudo apt update
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3884
3884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









