







1、前言
本篇文章我们介绍的内容是差速轮式机器人进行升级 ,我们添加相关的物理属性,使用gazebo+rviz进行仿真。 通过编写机器人控制的程序,遥控机器人在gazeob仿真环境中移动,并通过rviz实时察看 camera,kinect和lidar三种传感器的仿真效果。
2、编写环节
2.1 绘制 hometown_room 空间模型
(1)创建 mbot_gazebo 软件包,以及相关文件
cd ~/catkin_ws/src
catkin_create_pkg mbot_gazebo urdf xacro gazebo_plugins gazebo_ros gazebo_ros_control geometry_msgs roscpp rospy
cd mbot_gazebo
mkdir -p config launch meshes scripts urdf/sensor worlds
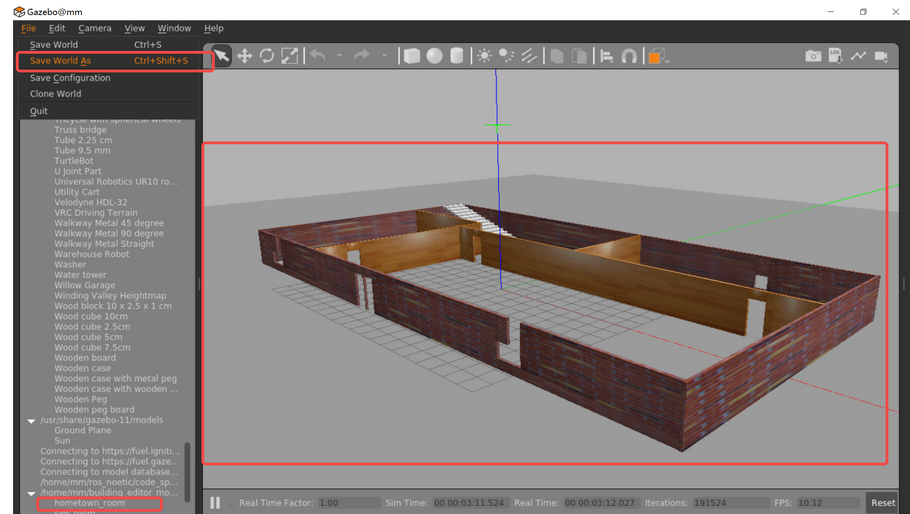
(2)启动gazebo,绘制hometown_room 空间模型,并保存 hometown_room.world 文件。
roslaunch gazebo_ros hometown_room.launch
2.2 为机器人模型添加物理属性和差速控制器插件
(1)在 mbot_gazebo 的 urdf 目录内,创建机器人模型文件
cd ~/catkin_ws/src/mbot_gazebo
touch mbot_base.xacro
touch sensor/camera.xacro sensor/kinect.xacro sensor/laser.xacor
(2)转动惯量和惯性矩阵:
转动惯量:Moment of Inertia,在物理学中,用于描述物体绕特定轴线旋转时的惯性大小,也就是物体抵抗旋转运动的能力。具体而言,对于某个轴线,离该轴线越远的物体质量对转动惯量的贡献越大。
惯性矩阵:描述物体关于某一点的转动惯量的3x3的对称矩阵。
在ROS中,这个矩阵的形式如下:
| ixx ixy ixz |
| ixy iyy iyz |
| ixz iyz izz |
对角线上的元素(ixx, iyy, izz)分别表示物体绕x轴、y轴和z轴的主转动惯量。非对角元素(ixy, ixz, iyz)表示物体关于不同轴之间的耦合作用,也就是说他们表示当物体同时绕多个轴旋转时存在的影响,这些被称为非对角转动惯量。
对于均匀的几何体(如长方体、圆柱体、球体等),它们的主轴通常与物体的对称轴相沿。在这种情况下,如果我们选择这些对称轴作为参考系(坐标系),那么非对角元素(也就是耦合项)将会消失,所以设为0。如果,物体旋转轴并不完全沿着这些主轴,那么就需要计算和考虑非对角元素了。
(3)圆柱体的惯性矩阵:m是物体质量,r是圆柱半径,h是圆柱高度
ixx:圆柱体绕x轴的转动惯量,I = m * (3 * r^2 + h^2) / 12
iyy:圆柱体绕y轴的转动惯量,与绕x轴相同
izz:圆柱体绕z轴的转动惯量,I = m * r^2 / 2
ixy, ixz, iyz均为0,表示非对角转动惯量为0。
(4)球体的惯性矩阵:m是物体质量,r是圆柱半径
ixx/iyy/izz:球体绕x,y,z轴的转动惯量公式:I = 2 * m * r^2 / 5
ixy, ixz, iyz均为0,表示非对角转动惯量为0。
(5) 一个刚体 link,有外观和物理两大属性,其中物理属性又包括:惯性矩阵(inertial matrix)和碰撞参数(collision properties)。
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
以差速轮式机器人万向轮为例,其惯性矩阵为:
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
至于刚体的碰撞参数,一般与外观一致,以底盘base_link为例,其外观,惯性矩阵和碰撞参数为:
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="red" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<xacro:cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
(6)刚体link如果要在gazebo上显示,必须使用gazebo标签,可以添加颜色,或者关闭重力:
<gazebo reference="${prefix}_wheel_link">
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 241
241

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











