




发表时间:CORL 2024 (Best paper)
论文链接:https://readpaper.com/pdf-annotate/note?pdfId=2476642985732261376¬eId=2480092969164874752
作者单位:Stanford University(Li Fei-Fei)
Motivation:将机器人操作任务表示为关联机器人和环境的约束,是编码所需机器人行为的一种有前途的方法。然而,目前尚不清楚如何制定约束,使它们 1) 适用于不同的任务,2) 无需手动标记,以及 3) 由现成的求解器可实时生成机器人动作。
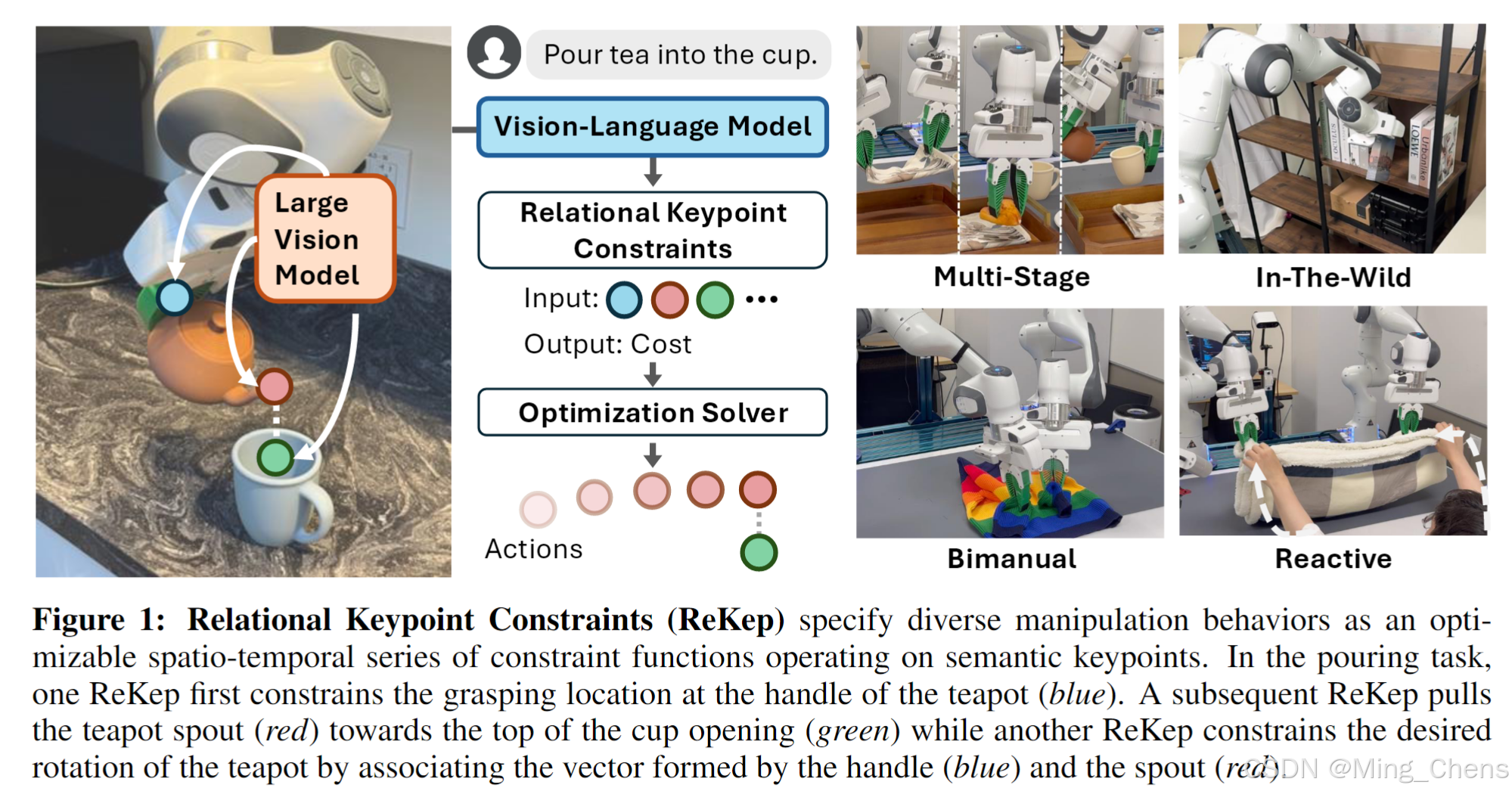
解决方法:具体来说,ReKep 表示为 Python 函数,将环境中的一组 3D 关键点映射到数值成本。我们证明了通过将操作任务表示为一系列关系关键点约束,我们可以使用分层优化过程来解决机器人动作(由 SE(3) 中的末端执行器姿势序列表示),并以实时频率感知-动作循环。
在机器人学中,SE(3) 常用于描述机器人的末端执行器(如机械臂的末端)的运动。末端执行器的姿势序列可以由一系列 SE(3) 变换矩阵表示,这些变换矩阵描述了末端执行器在不同时间点的位置和方向。(即SE3是末端位姿)
 我们的贡献总结如下:
我们的贡献总结如下:
1)我们将操作任务制定为具有关系关键点约束的分层优化问题;
2)我们设计了一个管道,使用大型视觉模型和视觉语言模型自动指定关键点和约束;
3)我们在两个真实机器人平台上展示了系统实现,该平台
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 912
912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











