




发表时间:NeurIPS 2024
论文链接:https://readpaper.com/pdf-annotate/note?pdfId=2517084963921814272¬eId=2519032879246930432
作者单位:MIT CSAIL(Kaiming开始做具身了)
Motivation:Previous robot learning methods often collect data to train with one specific embodiment for one task(不够通用), which is expensive and prone to overfitting.
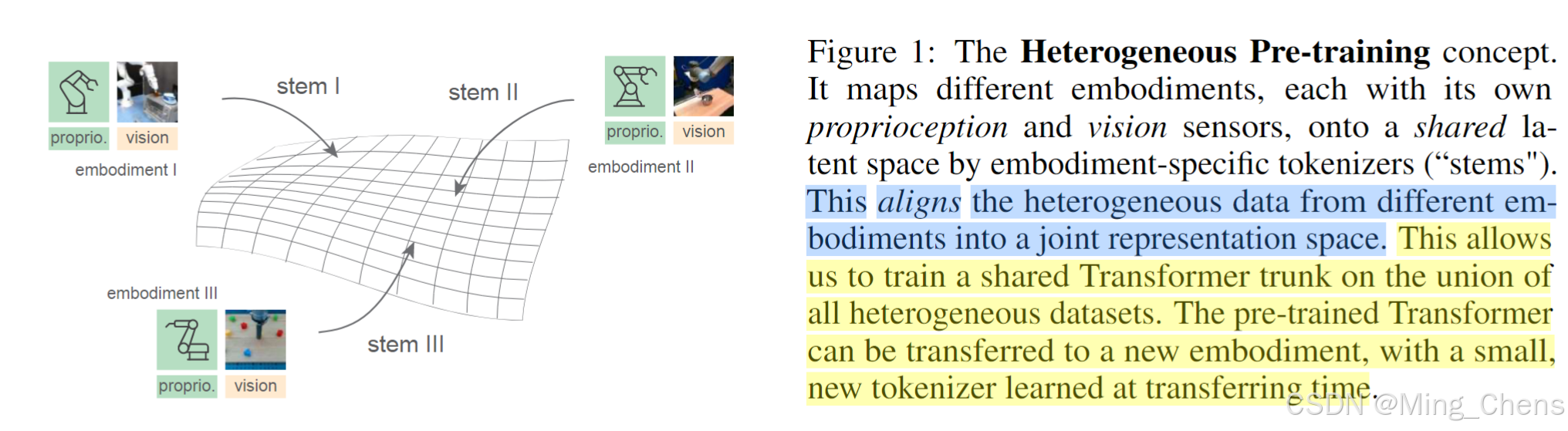
解决方法:This work studies the problem of learning policy representations through heterogeneous pretraining on robot data across different embodiments and tasks at scale.
实现方式:提出Heterogeneous Pre-trained Transformers (HPT), which pre-train a large, shareable trunk of a policy neural network to learn a task and embodim
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1142
1142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











