




 本文介绍如何使用Matlab的lidarcamaracalibrator插件进行激光雷达与相机的联合标定。通过导入图像及点云数据,手动调整标定板范围与点云选择,最终实现精准标定。
本文介绍如何使用Matlab的lidarcamaracalibrator插件进行激光雷达与相机的联合标定。通过导入图像及点云数据,手动调整标定板范围与点云选择,最终实现精准标定。
标定过程
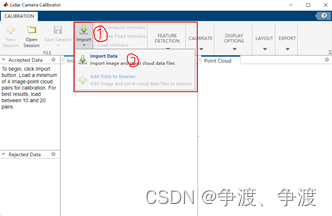
标定数据导入matlab lidar camara calibrator 插件,点击图示中的Import后选择Import Data如图所示:
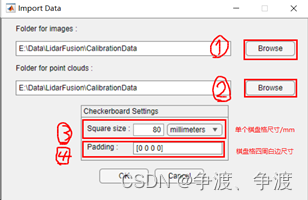
依次选择导入图像和点云数据如下后点击“确定”:
Matlab会自动导入数据并计算相机内参,然后开始进行相机和点云数据的处理,并进行自动标定,但自动标定结果一般较差,会提示没有探测到目标,这都是正常现象。
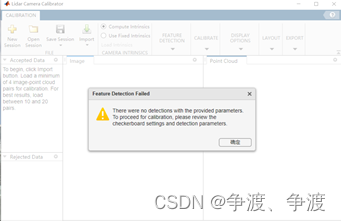
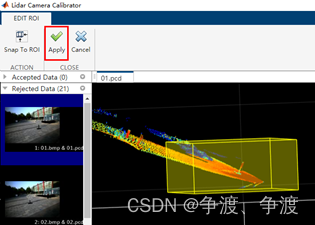
需要进行手动调整后就能精确标定。点击“确定”后调整过程如下。首先选择Edit ROI,也就是划定一个棋盘格(标定板)的范围,不用太大,能将所有采样的标定板包含在内就行,如图所示。

然后进行区域的调整如下所示,然后点击“应用”即可:(旋转和选定框的调整还是有一定难度的,多试试就好)
 然后先调整好Dimension T
然后先调整好Dimension T
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6843
6843







 到【灌水乐园】发言
到【灌水乐园】发言







