




 本文探讨了基于采样的机器人运动规划(SBP)技术的关键组件,包括采样过程、度量、最近邻搜索、父节点选择、局部规划及碰撞检测。SBP技术通过随机或准随机方式选择配置,有效解决机器人路径规划问题。
本文探讨了基于采样的机器人运动规划(SBP)技术的关键组件,包括采样过程、度量、最近邻搜索、父节点选择、局部规划及碰撞检测。SBP技术通过随机或准随机方式选择配置,有效解决机器人路径规划问题。
文献:《Sampling-Based Robot Motion Planning: A Review -2014 》
-
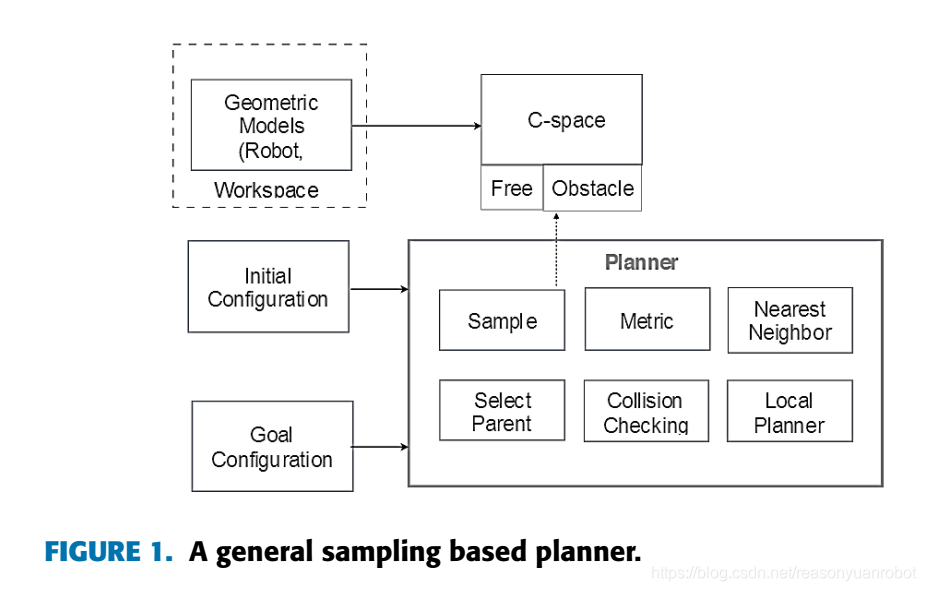
Sampling采样: 该过程用于随机或准随机地选择一个配置,并将其添加到树或路线图中。如前所述,样本既可以在自由空间,也可以在障碍配置空间。它可以被认为是规划器的核心和SBP相对于其他技术的主要优势。
- Metric 度量:给定两个配置qa和qb,这个过程返回一个值,或成本,表示从qa达到qb所需的能耗。重要的是,它真正代表了这两种配置之间的能耗或完成时间。如果没有该度量指标,常常会返回高度次优的解决方案。highly suboptimal
- Nearest Neighbor (NN)最近邻搜索: 它是一种搜索算法,将最近的节点返回给新样本。该值基于预定义的度量函数。
- Select Parent选择父节点: 此过程选择一个现有节点连接到新采样的节点。该现有节点被视为父节点。RRT选择最近的节点作为父节点。PRM将样本连接到其邻域内的几个节点。另一方面,EST根据相邻节点数选择一个父节点进行随机扩展。Ariadne's clew使用遗传算法选择一个父节点进行扩展。
- 局部规划Local planning: 给定两种配置qa和qb,此过程试图在它们之间建立连接connection。使用直线路径是直观的。对于大多数机器人系统,由于运动学或动力学的限制,这不是一个feasible plan。
- 碰撞检测Collision checking (CC): 检测nodes是否与Cobs相交。

















 1954
1954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









