









从概念上讲,主题介于发布和订阅之间。每个发布通道必须由订阅明确标识,以便只接收其感兴趣的数据流,而不接收其他发布的数据。主题正是为此而生,它允许共享同一主题的发布和订阅匹配并开始通信。从这个意义上讲,主题充当了数据流的描述。
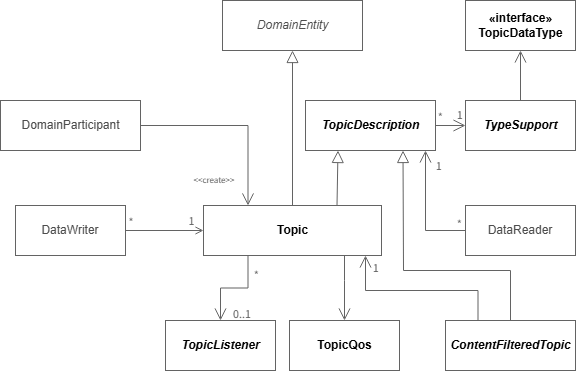
发布总是与单个主题相链接,而订阅则与更广泛的TopicDescription概念相链接。
发布总是与单个主题相链接,而订阅则与更广泛的TopicDescription概念相链接。
3.5.1 主题(Topic)、键(Key)与实例(Instance)
根据定义,一个主题(Topic) 仅关联一种数据类型,因此与该主题相关的每个数据样本都可理解为对该数据类型所描述信息

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 471
471

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











