



在上篇文章中我们搭建完成了需要的环境,现在我们需要构建云深处x20机械狗和kinova-gen3-lite全身控制模型。
仿真模型的构建
1.下载机械臂与机械狗模型
1.1下载官网开源的机械狗模型
由于官网并没有x20urdf模型,询问官方人员后得知只需将x20运动主机升级后即可运行x30版本的sdk,这样就可以利用x30的模型训练完之后部署到x20身上。以下为x30模型链接,包括meshes和urdf文件:
https://github.com/DeepRoboticsLab/URDF_model
1.2下载官方开源的机械臂模型
下载地址如下,同样包括meshes和urdf文件:
2.组合机械臂和机械狗代码
2.1组合机械狗代码
根据b1z1的urdf模型,我们需要在x30urdf模型文件上增加颜色,基座,浮动基座和imu信息,其中部分代码如下:
<material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> <material name="blue"> <color rgba="0.0 0.0 0.8 1.0" /> </material> <material name="green"> <color rgba="0.0 0.8 0.0 1.0" /> </material> <material name="grey"> <color rgba="0.2 0.2 0.2 1.0" /> </material> <material name="silver"> <color rgba="0.9137254901960784 0.9137254901960784 0.8470588235294118 1.0" /> </material> <material name="orange"> <!-- <color rgba="1.0 0.4235294117647059 0.0392156862745098 1.0"/> --> <color rgba="0.12 0.15 0.2 1.0" /> </material> <material name="brown"> <color rgba="0.8705882352941177 0.8117647058823529 0.7647058823529411 1.0" /> </material> <material name="red"> <color rgba="0.8 0.0 0.0 1.0" /> </material> <material name="white"> <color rgba="1.0 1.0 1.0 1.0" /> </material> <link name="base_link"> <inertial> <origin xyz="0.0 0.0 0.0"/> <mass value="1e-12" /> <inertia ixx="1e-12" ixy="0" ixz="0" iyy="1e-12" iyz="0" izz="1e-12" /> </inertial> </link> <joint name="floating_base" type="fixed" dont_collapse="true"> <origin xyz="0 0 0" rpy="0 0 0" /> <parent link="base_link" /> <child link="TORSO" /> </joint> <link name="TORSO"> <inertial> <origin xyz="-0.0029257 7.5034e-06 0.020095" rpy="0 0 0" /> <mass value="30.7" /> <inertia ixx="0.364306" ixy="0.00018421" ixz="0.00027469" iyy="0.597627" iyz="0.00026784" izz="0.757267" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="../meshes/torso.dae" /> </geometry> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <box size="0.44 0.26 0.15"/> </geometry> </collision> </link> <joint name="imu_joint" type="fixed"> <parent link="TORSO" /> <child link="imu_link" /> <origin rpy="0 0 0" xyz="0 0 0" /> </joint> <link name="imu_link"> <inertial> <mass value="0.001" /> <origin rpy="0 0 0" xyz="0 0 0" /> <inertia ixx="0.0001" ixy="0" ixz="0" iyy="0.000001" iyz="0" izz="0.0001" /> </inertial> <visual> <origin rpy="0 0 0" xyz="0 0 0" /> <geometry> <box size="0.001 0.001 0.001" /> </geometry> <material name="red" /> </visual> <!-- <collision> <origin rpy="0 0 0" xyz="0 0 0"/> <geometry> <box size=".001 .001 .001"/> </geometry> </collision> --> </link>2.2 组合机械臂代码
同样,我们需要在机械臂和机械狗的之间建立连接,代码如下:
<joint name="base_static_joint" type="fixed"> <origin rpy="0 0 0" xyz="0.1 0 0.09>>" /> <parent link="base_link" /> <child link="BASE" /> </joint> <link name="BASE"> <inertial> <origin xyz="3 0 0" rpy="0 0 0" /> <mass value="1.14608471" /> <inertia ixx="0.00335854" ixy="3.9E-07" ixz="0.00010989" iyy="0.003311" iyz="1.91E-06" izz="0.00077158" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="../meshes/base_link.STL" /> </geometry> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="../meshes/base_link.STL" /> </geometry> </collision> </link>2.3组合夹爪代码
官方kinova-gen3-lite的机械臂中是不带夹爪的,这里我们用b1z1的夹爪,
<link name="gripperStator"> <visual> <origin rpy="1.5707963267948966 0 0" xyz="0 0 0"/> <geometry> <mesh filename="../meshes/z1_GripperStator.dae" scale="1 1 1"/> </geometry> </visual> <collision> <origin rpy="1.5707963267948966 0 0" xyz="0 0 0"/> <geometry> <mesh filename="../meshes/z1_GripperStator.dae" scale="1 1 1"/> </geometry> </collision> <!-- <collision> <geometry> <cylinder length="0.051" radius="0.0325"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0"/> </collision> --> <inertial> <origin rpy="1.5707963267948966 0 0" xyz="0.04764427 -0.00035819 -0.00249162"/> <mass value="0.52603655"/> <inertia ixx="0.00038683" ixy="3.59e-06" ixz="-7.662e-05" iyy="0.00068614" iyz="-2.09e-06" izz="0.00066293"/> </inertial> </link> <joint name="z1_jointGripper" type="revolute"> <origin rpy="0 0 0" xyz="0.049 0.0 0"/> <parent link="gripperStator"/> <child link="gripperMover"/> <axis xyz="0 1 0"/> <dynamics damping="1.0" friction="1.0"/> <limit effort="30.0" lower="-1.5707963267948966" upper="0.0" velocity="10"/> </joint> <link name="gripperMover"> <visual> <origin rpy="1.5707963267948966 0 0" xyz="0 0 0"/> <geometry> <mesh filename="../meshes/z1_GripperMover.dae" scale="1 1 1"/> </geometry> </visual> <collision> <origin rpy="1.5707963267948966 0 0" xyz="0 0 0"/> <geometry> <mesh filename="../meshes/z1_GripperMover.dae" scale="1 1 1"/> </geometry> </collision> <inertial> <origin rpy="1.5707963267948966 0 0" xyz="0.01320633 0.00476708 0.00380534"/> <mass value="0.27621302"/> <inertia ixx="0.00017716" ixy="-1.683e-05" ixz="1.786e-05" iyy="0.00026787" iyz="-2.62e-06" izz="0.00035728"/> </inertial> </link> <joint name="ee_gripper" type="fixed" dont_collapse="true"> <axis xyz="1 0 0"/> <origin rpy="0 0 0" xyz="0.135 0 0"/> <parent link="gripperStator"/> <child link="ee_gripper_link"/> </joint> <link name="ee_gripper_link"> <inertial> <mass value="0.001"/> <inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/> </inertial> </link>注意:
b1z1默认的夹爪与机械臂末端最后一个关节方向不一致,我们将其旋转保持一致。同时机械臂和机械狗的名称需要进行修改,如下代码所示
<link name="FR_SHANK"> <inertial> <origin xyz="0.014851 2.0687e-05 -0.12283" rpy="0 0 0" /> <mass value="0.71386" /> <inertia ixx="0.0093039" ixy="1.7692e-07" ixz="0.00034843" iyy="0.0096272" iyz="-3.7714e-06" izz="0.00041542" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="../meshes/shank.dae" /> </geometry> </visual> <collision> <origin rpy="0. -0.40 0." xyz="0.02 0 -0.046" /> <geometry> <cylinder length="0.1" radius="0.025"/> </geometry> </collision> <collision> <origin rpy="0. 0 0." xyz="0.045 0 -0.155" /> <geometry> <cylinder length="0.12" radius="0.025"/> </geometry> </collision> <collision> <origin rpy="0. 0.45 0." xyz="0.025 0 -0.246" /> <geometry> <cylinder length="0.08" radius="0.022"/> </geometry> </collision> </link> <joint name="FR_calf_joint" type="revolute"> <origin xyz="0 0 -0.30" rpy="0 0 0" /> <parent link="FR_THIGH" /> <child link="FR_SHANK" /> <axis xyz="0 -1 0" /> <dynamics damping="0.01" friction="0.03"/> <limit lower="0.349" upper="2.531" effort="180" velocity="16.1" /> </joint>注意:
每个关节有三部分名称需要注意,link name对应meshes文件中的关节文件名称,joint name对应cfg文件中定义的初始关节名称,这里我们需要修改原文件将其与b1z1的cfg名称相匹配,mesh filename为meshes对应各个关节文件所在地址,这里包括机械臂和机械狗18个关节都需要更改,以上为其中一个关节范例。
3. 编写测试文件,观察各个关节是否安装正常:
我们的测试文件代码如下:
import gym import numpy as np from isaacgym.torch_utils import * from isaacgym import gymtorch, gymapi, gymutil import torch import os import math import random # 初始化gymAPI gym = gymapi.acquire_gym() # 创建仿真环境 sim_params = gymapi.SimParams() sim_params.dt = 1 / 60 sim_params.substeps = 2 sim_params.up_axis = gymapi.UP_AXIS_Z sim_params.gravity = gymapi.Vec3(0.0, 0.0, -9.8) # PhysX-specific parameters sim_params.physx.use_gpu = True sim_params.physx.solver_type = 1 sim_params.physx.num_position_iterations = 6 sim_params.physx.num_velocity_iterations = 1 sim_params.physx.contact_offset = 0.01 sim_params.physx.rest_offset = 0.0 # Flex-specific parameters sim_params.flex.solver_type = 5 sim_params.flex.num_outer_iterations = 4 sim_params.flex.num_inner_iterations = 20 sim_params.flex.relaxation = 0.8 sim_params.flex.warm_start = 0.5 # 配置地面 plane_params = gymapi.PlaneParams() plane_params.normal = gymapi.Vec3(0, 0, 1) # z-up plane_params.distance = 0 plane_params.static_friction = 1 plane_params.dynamic_friction = 1 plane_params.restitution = 0 # 创建仿真 compute_device_id = 0 # 计算设备ID graphics_device_id = 0 # 图形设备ID physics_engine = gymapi.SIM_PHYSX # 选择物理引擎 # 创建仿真 sim = gym.create_sim(compute_device_id, graphics_device_id, physics_engine, sim_params) # 创建地面 gym.add_ground(sim, plane_params) # URDF文件的路径 asset_root = os.path.expanduser("~/whn/visual_wholebody-main/low-level/resources/robots/x30-gen3") asset_file = "urdf/X30-gen3.urdf" asset_options = gymapi.AssetOptions() asset_options.fix_base_link = True asset_options.armature = 0.01 # 加载资产 asset = gym.load_asset(sim, asset_root, asset_file, asset_options) # 创建环境网格 spacing = 2.0 lower = gymapi.Vec3(-spacing, 0.0, -spacing) upper = gymapi.Vec3(spacing, spacing, spacing) num_envs = 3 envs_per_row = 8 # 创建并填充环境 envs = [] actor_handles = [] for i in range(num_envs): # 创建环境 env = gym.create_env(sim, lower, upper, envs_per_row) envs.append(env) # 随机高度生成 height = random.uniform(1.0, 2.5) # 设置起始位置 pose = gymapi.Transform() pose.p = gymapi.Vec3(0.0, height, 0.0) # 创建 actor actor_handle = gym.create_actor(env, asset, pose, "MyActor", i, 1) actor_handles.append(actor_handle) # 创建视图器 cam_props = gymapi.CameraProperties() viewer = gym.create_viewer(sim, cam_props) # 进入仿真循环 while not gym.query_viewer_has_closed(viewer): # 进行物理仿真 gym.simulate(sim) gym.fetch_results(sim, True) # 更新视图 gym.step_graphics(sim) gym.draw_viewer(viewer, sim, True) # 等待仿真步长与实际时间同步 gym.sync_frame_time(sim) # 销毁视图器和仿真 gym.destroy_viewer(viewer) gym.destroy_sim(sim)注意:urdf文件路径为你所创建的模型文件路径
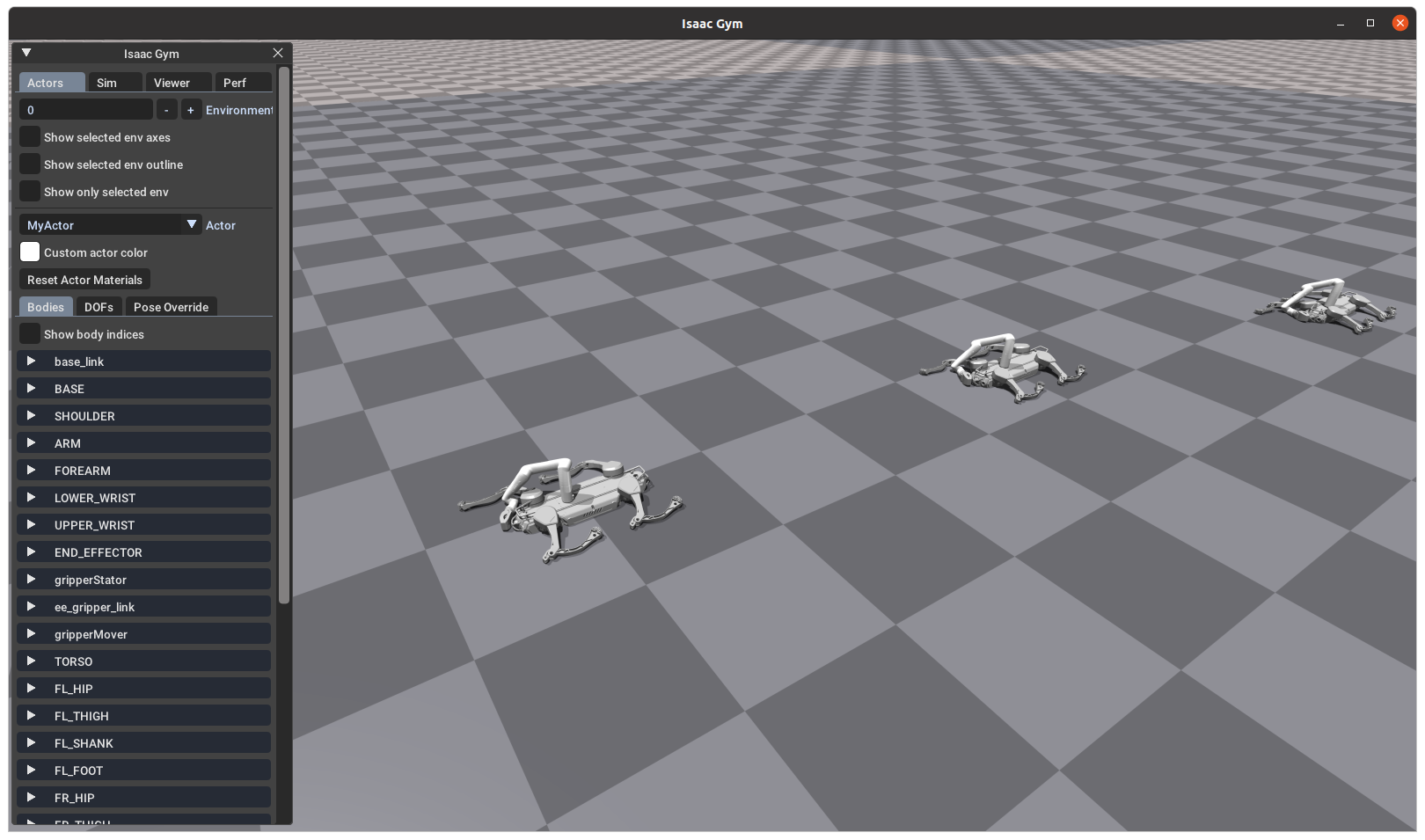
4.最终展示:
若最终仿真模型如下所示,则表示全身控制模型建立完成。
本篇文章成功建立了仿真全身控制模型,接下来我们将创建x20-gen3全身控制模型的cfg,并获取其部署到sdk的相关参数。

















 291
291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









