






在前面文章中尝试了几种3D SLAM算法进行高精度建图,为了实现后续小车的导航任务,这里开始对小车在地图中进行定位
1.安装编译
#创建工作空间
mkdir -p ~/ndt_localizer/src
cd ~/ndt_localizer/src
catkin_init_workspace
git clone https://github.com/hujiax380/ndt_loc.git
cd ..
catkin_make2.修改配置文件
2.1修改map_loader.launch
将原来的pcd_path替换成(包)/路径/文件名
将你通过3D算法建的pcd地图放到ndt_localizer/src/ndt_loc/ndt_localizer/map下

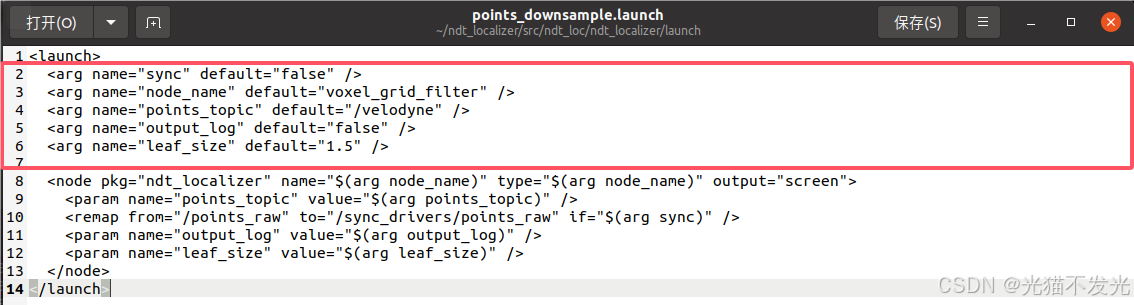
2.2修改points_downsample.launch
修改你雷达的话题名
该处根据雷达情况设置size,原作者建议是:
如果您的 Lidar 数据稀疏(如 VLP-16),则需要配置更小的 .如果你的激光雷达点云很密集(VLP-32、Hesai Pander40P、HDL-64 等)保持为:leaf_size 2.0 或3.0
2.3修改static_tf.launch
根据你自己雷达的frame_id进行修改

3.运行DNT定位算法
3.1运行DNT定位算法(等待一点时间在rviz中加载出地图)
cd ndt_localizer
source ./devel/setup.bash
roslaunch ndt_localizer ndt_localizer.launch
3.2打开新终端播放数据包
4.注意事项:
我在进行定位时发现有很大的漂移问题,为解决,修改了在参数,如下:
ndt_localizer/src/ndt_loc/ndt_localizer/launch/ndt_localizer.launch文件,其中
- trans_epsilon:两个连续变换的最大差异,默认为0.05,用于判断是否收敛。数值越小,精度越高,但可能增加收敛时间。
- step_size:优化算法的最大步长,默认为0.1。调整步长可以平衡收敛速度与稳定性。
- resolution:NDT体素网格的分辨率,默认为2.0。数值越小,精度越高,但计算量增加;数值越大,精度较低但计算量减少。
- max_iterations:最大迭代次数,默认为30,控制对齐计算的迭代上限,防止过度计算。
- converged_param_transform_probability:通常用于定义变换概率的阈值,作为收敛判断的另一个依据。
我设置的如下可供参考: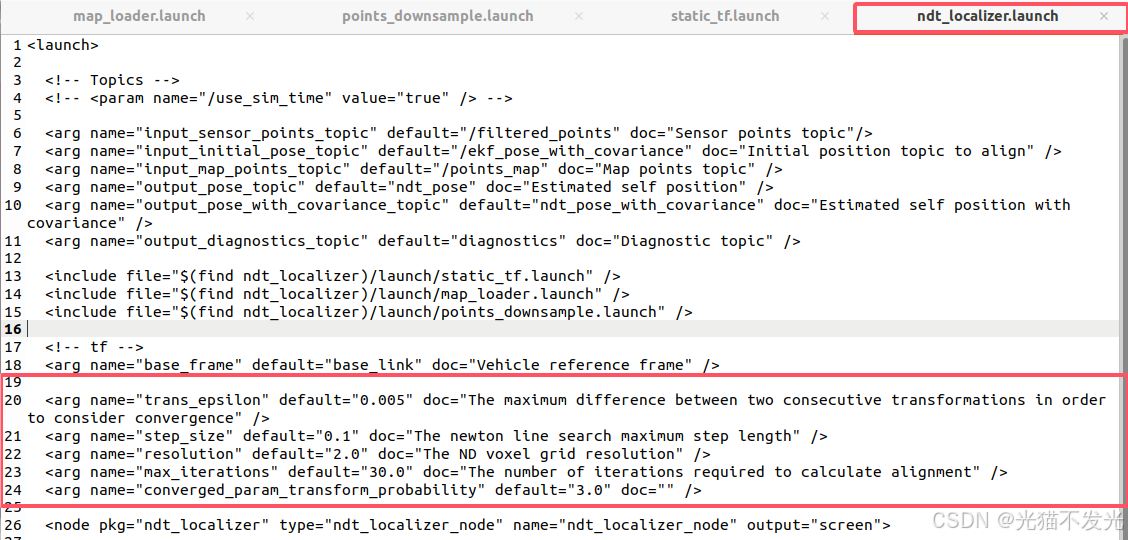
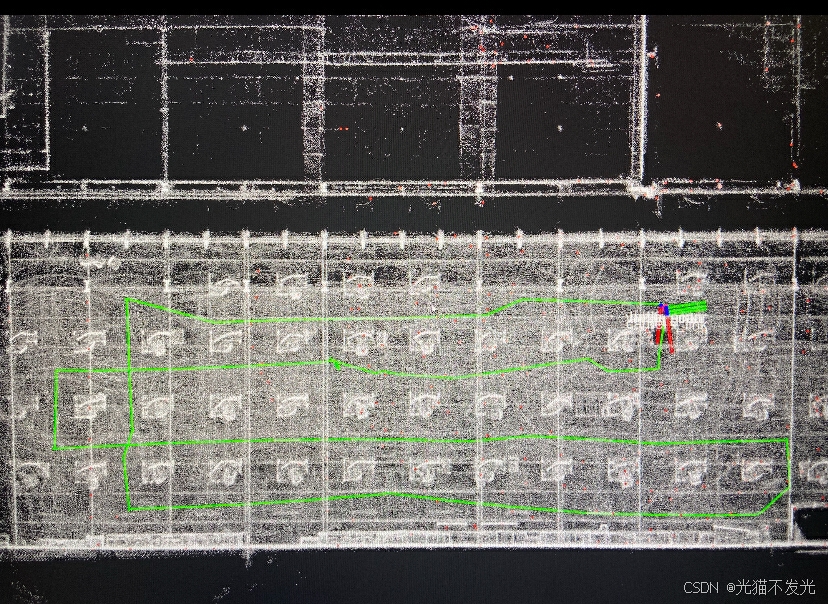
5.最后展示效果:(和我实际跑的路线基本符合)


















 202
202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









