







 文章详细阐述了机器人正运动学和逆运动学的概念,正运动学涉及已知关节角度计算末端执行器位姿,而逆运动学则是求解给定末端执行器位置后的关节值。以PUMA560机器人为例,展示了逆运动学的解题过程,包括运动分解和求解关节角的步骤。
文章详细阐述了机器人正运动学和逆运动学的概念,正运动学涉及已知关节角度计算末端执行器位姿,而逆运动学则是求解给定末端执行器位置后的关节值。以PUMA560机器人为例,展示了逆运动学的解题过程,包括运动分解和求解关节角的步骤。
正运动学与逆运动学——机器人学(三)
机器人正运动学:
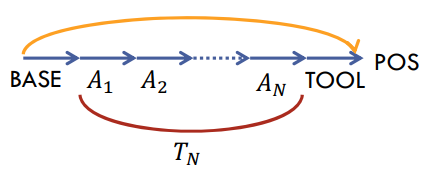
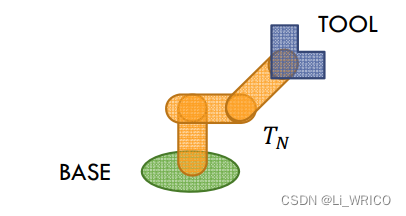
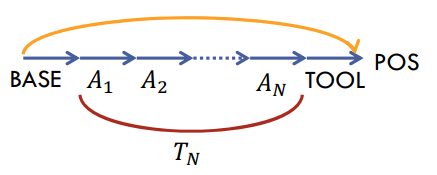
正运动学指的是已知机器人所有连杆长度和关节角度,计算机器人末端执行器的位姿。
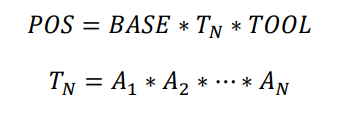
如上个博客中:已知 A 1 , A 2 , . . . A n A_1,A_2,...A_n A1,A2,...An,求POS:
\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space
\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space
故,可得:
\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space\space
机器人逆运动学:
逆运动学是已知末端执行器位置和姿态,求解机器人的关节值,从而将机器人放置在期望的位姿。逆运动学更重要。
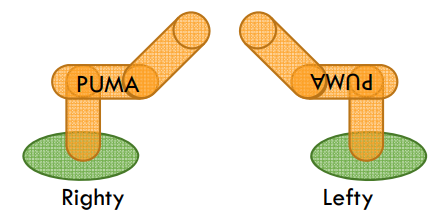
以PUMA560为例,已知 T 6 T_6 T6,求 A 1 . . . A 6 A_1...A_6 A1...A6:
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
\space
运动分解,两边同时乘以 A 1 − 1 A_1^{-1} A1−1:
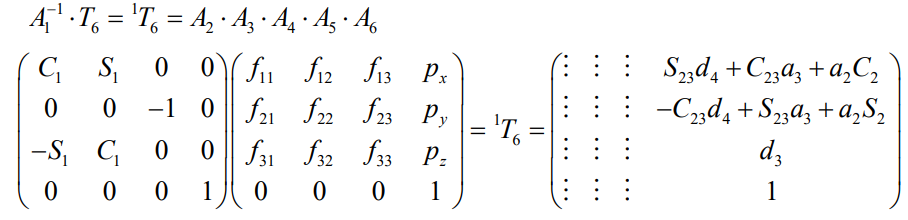
得到:
 |  |
|---|
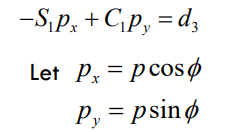
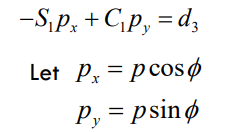
进一步解得:
 |  |
|---|
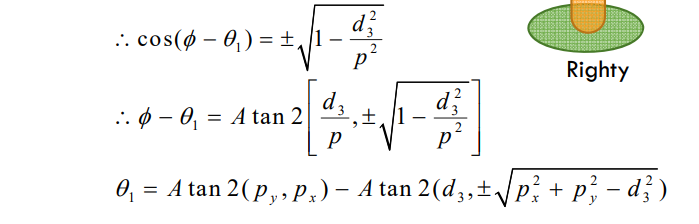
然后根据 d 3 d_3 d3上面两个值继续解 θ 3 \theta_3 θ3:
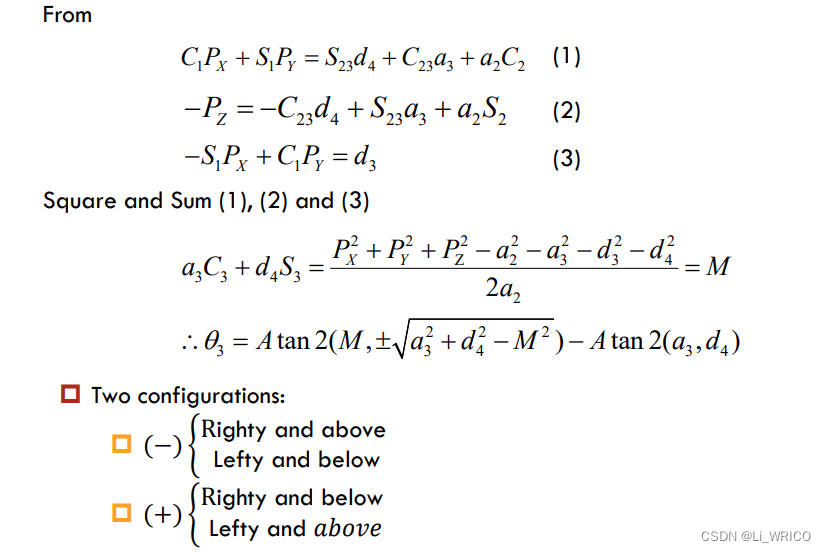
可以得到正负两组解。
接着,直接乘到
3
T
6
^{3}T_6
3T6,解后三组解:
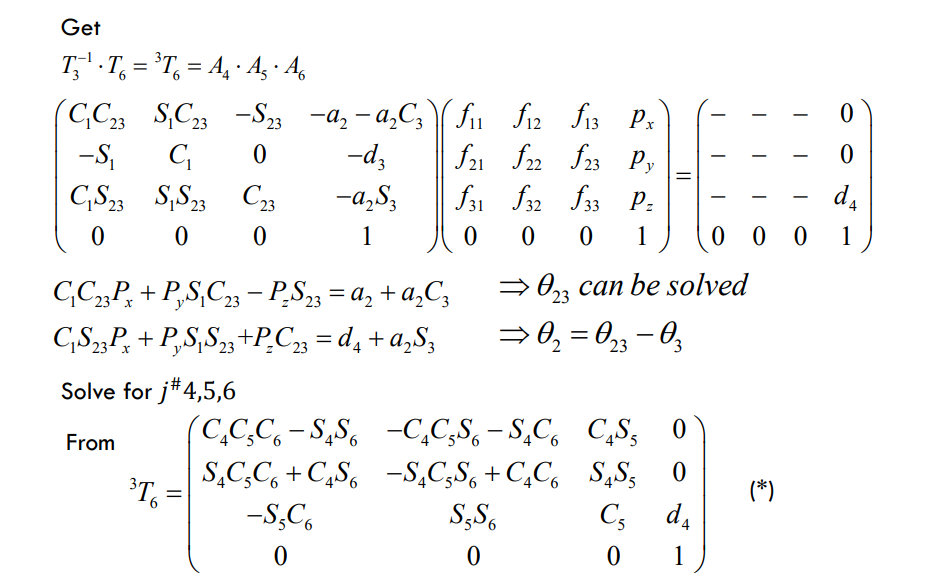
然后解得:
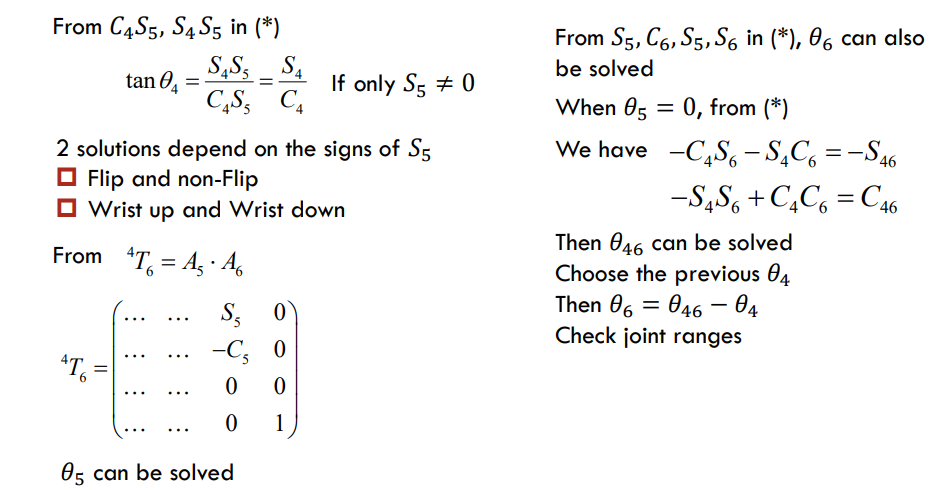
逆运动学解的方式不唯一,本方法作参考。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









