







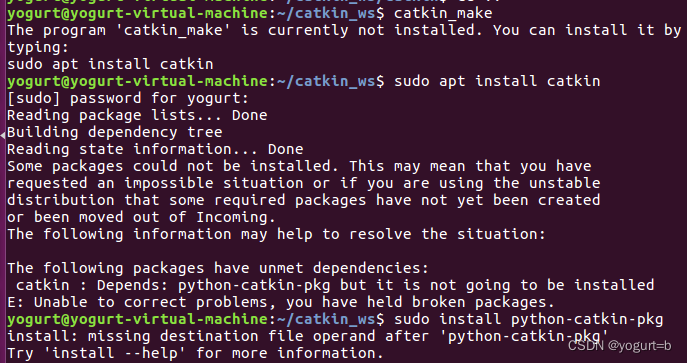
配置环境变量
echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
source ~/.bashrc
 https://blog.youkuaiyun.com/epnine/article/details/123165476
https://blog.youkuaiyun.com/epnine/article/details/123165476
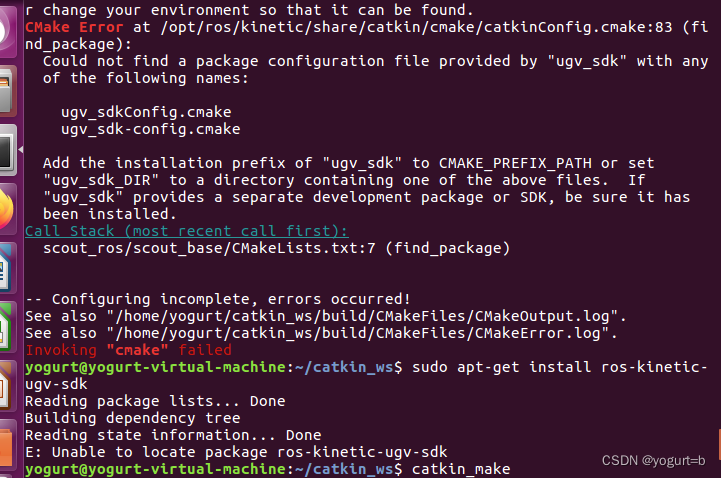
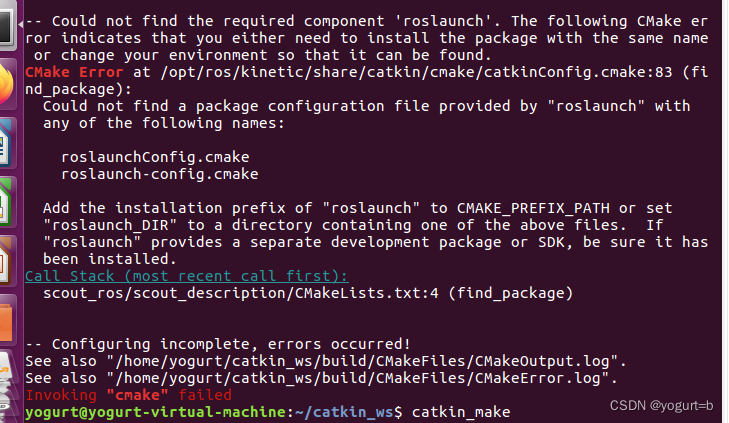
在/src文件夹下载ugv_sdk
git clone https://ghproxy.com/https://github.com/agilexrobotics/ugv_sdk.git
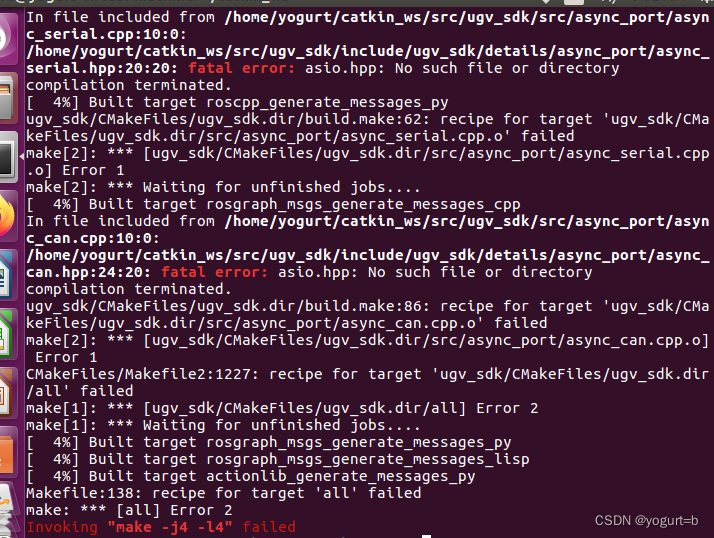 要安装ASIO库:
要安装ASIO库:
要检查ASIO库是否已安装在Ubuntu系统上,可以使用dpkg包管理器。打开终端并运行以下命令:
dpkg -l libasio-dev
如果安装了ASIO,您将看到有关软件包的信息,包括其版本和说明。如果没有安装,您会收到一条消息,说找不到包。
如果未安装ASIO,则可以使用软件包管理器进行安装。运行以下命令:
sudo apt-get install libasio-dev
这将在您的系统上下载并安装ASIO库及其开发文件。
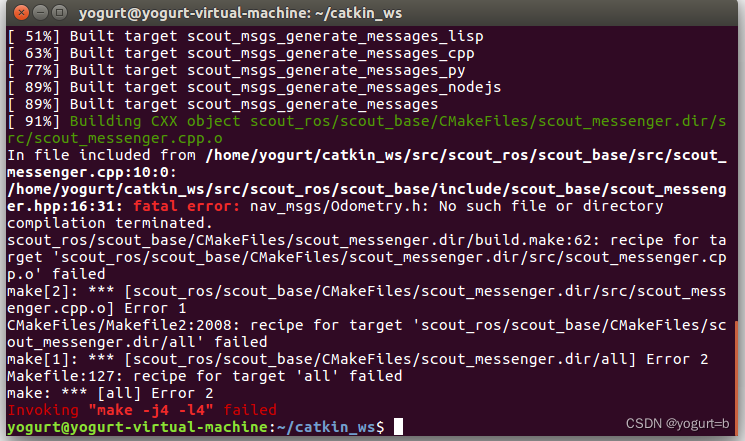
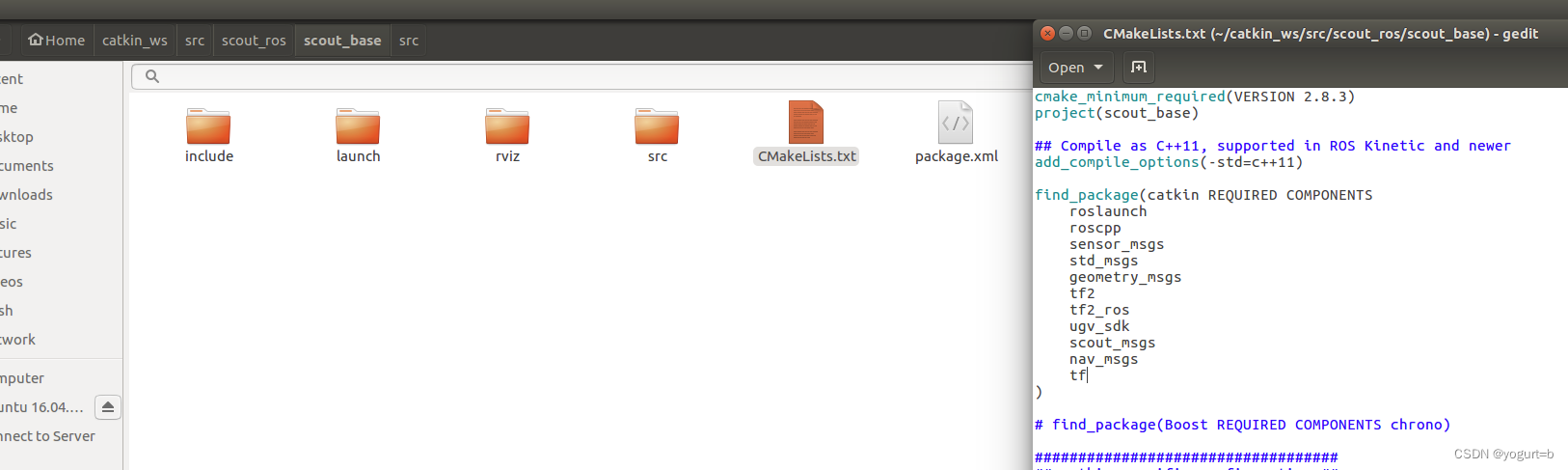
在include前那个目录更改CMakeList.txt,重复上述步骤安装缺少的东西。
https://blog.youkuaiyun.com/qq_18676517/article/details/115640181?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169718397616800226593261%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=169718397616800226593261&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduend~default-1-115640181-null-null.142v96pc_search_result_base6&utm_term=ROS%E7%BC%BA%E5%B0%91%E5%A4%B4%E6%96%87%E4%BB%B6&spm=1018.2226.3001.4187

















 2383
2383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









