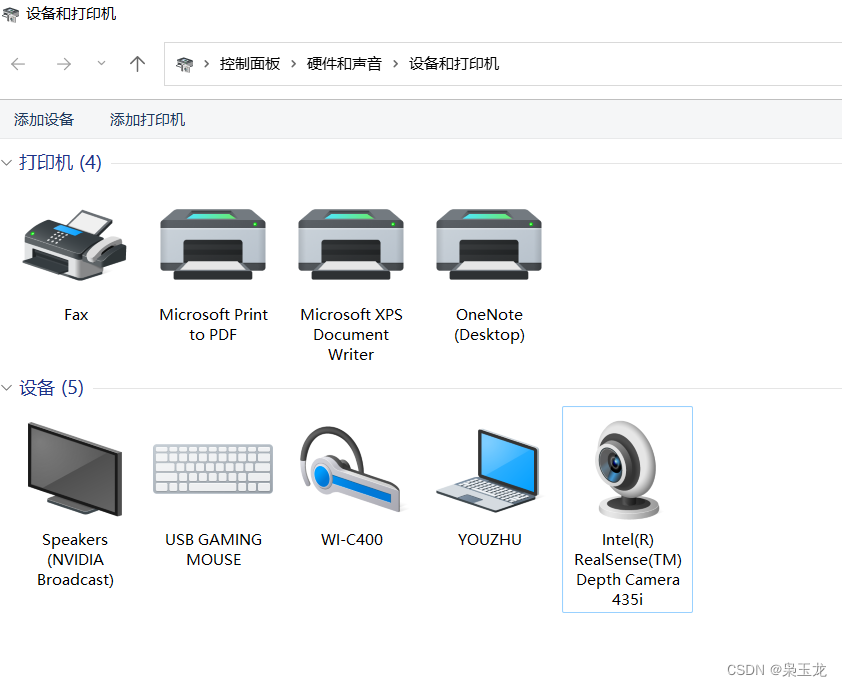
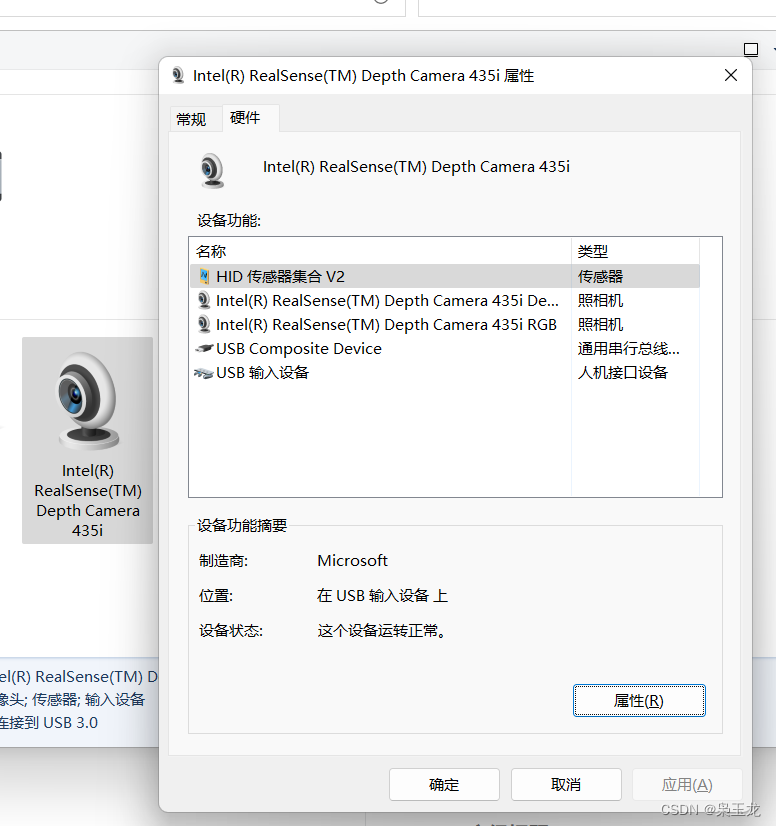
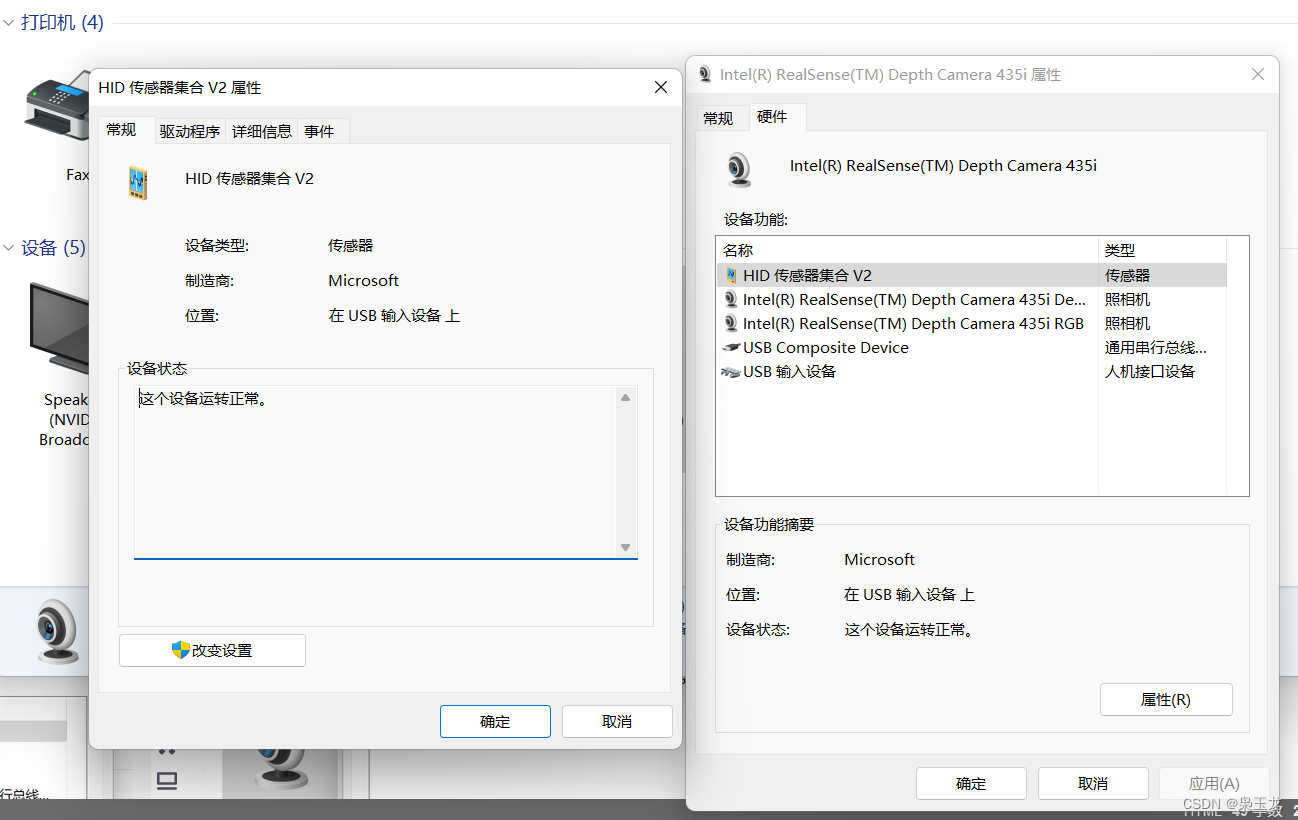
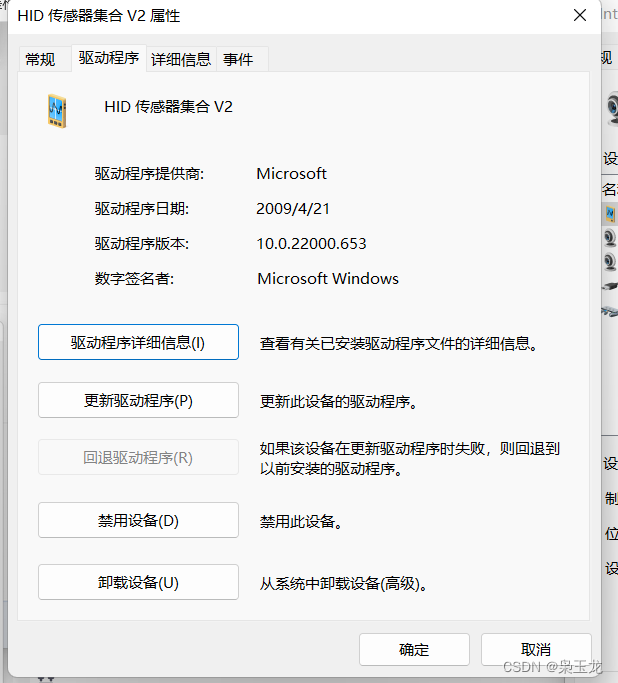
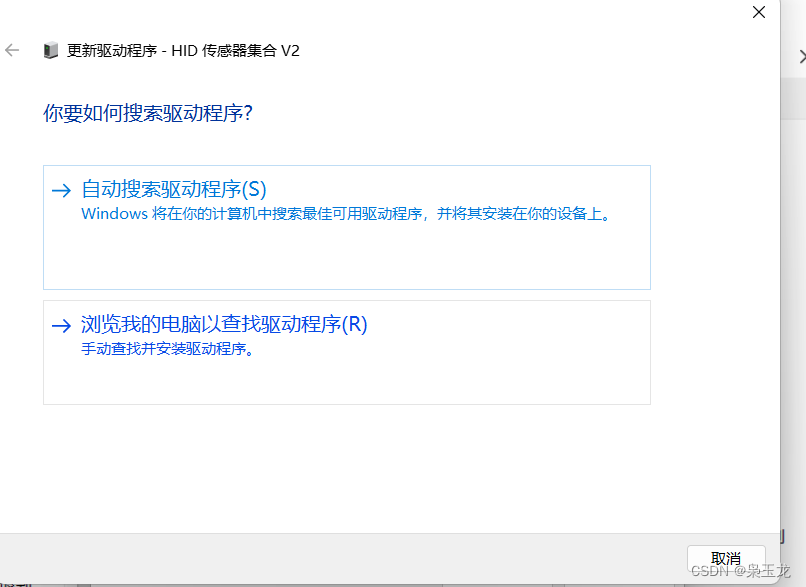
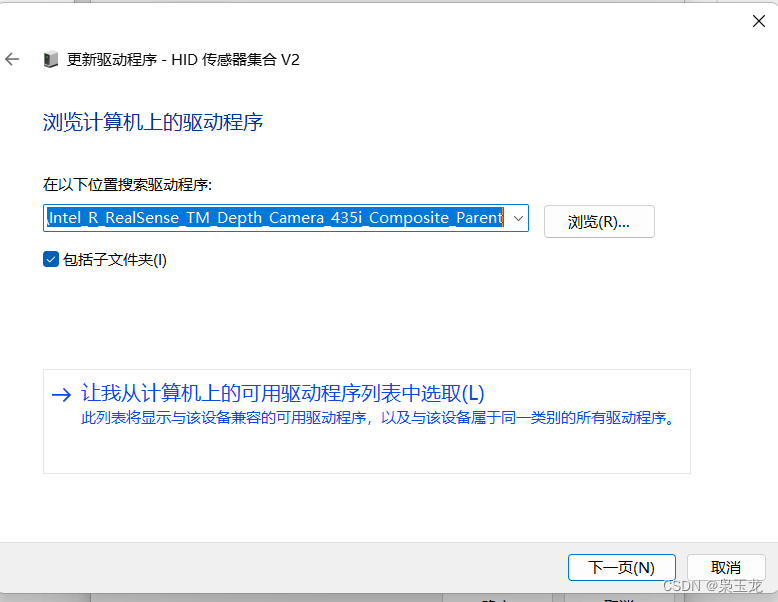
第一步:打开电脑设置,找到设备和打印界面,找到对应连接的是摄像头设备 第二步:打开对应的相机设置属性界面 第三步:选择硬件属性 第四步:点击驱动程序进行点击更新驱动程序 第五步:点击浏览我的电脑以查找驱动程序 第六步:点击让我从计算机上选取驱动 第七步:找到USB进行设置就完成了





























 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








