






前言
之前得到的pcd点云文件,最近已经用在了八叉树路径规划中,等代码完善后再写出来吧,先记录下这中间遇到的一个问题,就是要将pcd文件转换为bt文件。
.pcd 和 .bt
pcd文件已经很熟悉了,而八叉树是一种递归的数据结构,用于将三维空间划分为立方体(或正方体)的层次结构。.bt文件通常用于存储八叉树数据,这些数据可以是各种类型,例如空间中的点云、体素信息、地图数据等,.bt文件是以二进制形式存储的,这样可以有效地表示大量的三维数据,并在需要时快速读取和解析。
步骤
进入自己的工作空间内的src文件下,新建一个pcd_bt文件夹,新建一个pcd2bt.cpp和CMakeLists.txt
pcd2bt.cpp复制粘贴:
#include <iostream>
#include <assert.h>
//pcl
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
//octomap
#include <octomap/octomap.h>
using namespace std;
int main( int argc, char** argv )
{
if (argc != 3)
{
cout<<"error"<<endl;
return -1;
}
string input_file = argv[1];
string output_file = argv[2];
pcl::PointCloud<pcl::PointXYZI> cloud;
pcl::io::loadPCDFile<pcl::PointXYZI> ( input_file, cloud );
cout<<"point cloud loaded, piont size = "<<cloud.points.size()<<endl;
//声明octomap变量
cout<<"copy data into octomap..."<<endl;
// 创建八叉树对象,参数为分辨率,这里设成了0.05
octomap::OcTree tree( 0.05 );
for (auto p:cloud.points)
{
// 将点云里的点插入到octomap中
tree.updateNode( octomap::point3d(p.x, p.y, p.z), true );
}
// 更新octomap
tree.updateInnerOccupancy();
// 存储octomap
tree.writeBinary(output_file);
cout<<"done."<<endl;
return 0;
}CMakeLists.txt复制粘贴:
cmake_minimum_required(VERSION 2.8)
project(my_project_pcd2bt)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-std=c++14")
# 设置编译类型为Release
# 添加PCL库的依赖
find_package(PCL REQUIRED )
# 添加octomap库的依赖
find_package(octomap REQUIRED)
# 添加头文件路径
include_directories(${PCL_INCLUDE_DIRS})
include_directories(${OCTOMAP_INCLUDE_DIRS})
# 添加链接库路径
link_directories(${PCL_LIBRARY_DIRS})
link_directories(${OCTOMAP_LIBRARY_DIRS})
# 编译可执行文件
add_executable(pcd2bt pcd2bt.cpp)
# 链接依赖库
target_link_libraries(pcd2bt ${PCL_LIBRARIES})
target_link_libraries(pcd2bt ${OCTOMAP_LIBRARIES})在当前文件下打开一个终端,编译
mkdir build
cd build
cmake ..
make进入build文件下打开一个终端,执行程序,pcd的文件名和文件路径替换成自己的,运行成功后会生成一个test.bt文件。
./pcd2bt /home/fast-drone/orb_ws/src/pcd_bt/test.pcd test.bt 
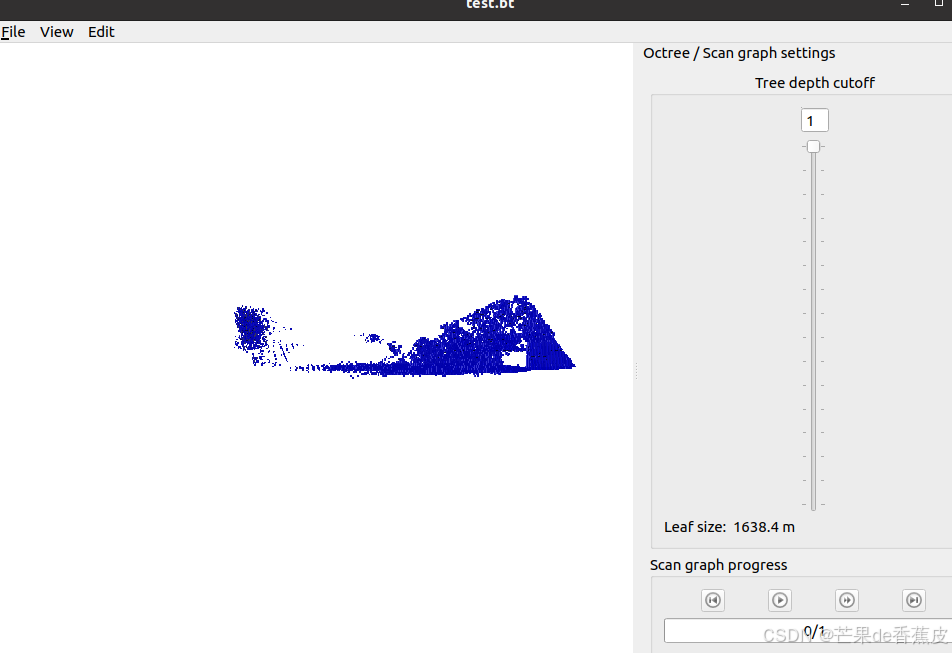
使用octovis查看八叉树点云文件,输入下面指令安装octovis
sudo apt-get install liboctomap-dev octovis使用octovis查看八叉树点云文件:
octovis test.bt

















 4292
4292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









