







rviz模型显示不出来
首先使用命令检查tf tree
rosrun tf view_frames
或者
rosrun rqt_tf_tree rqt_tf_tree
(1)出现下面的情况:
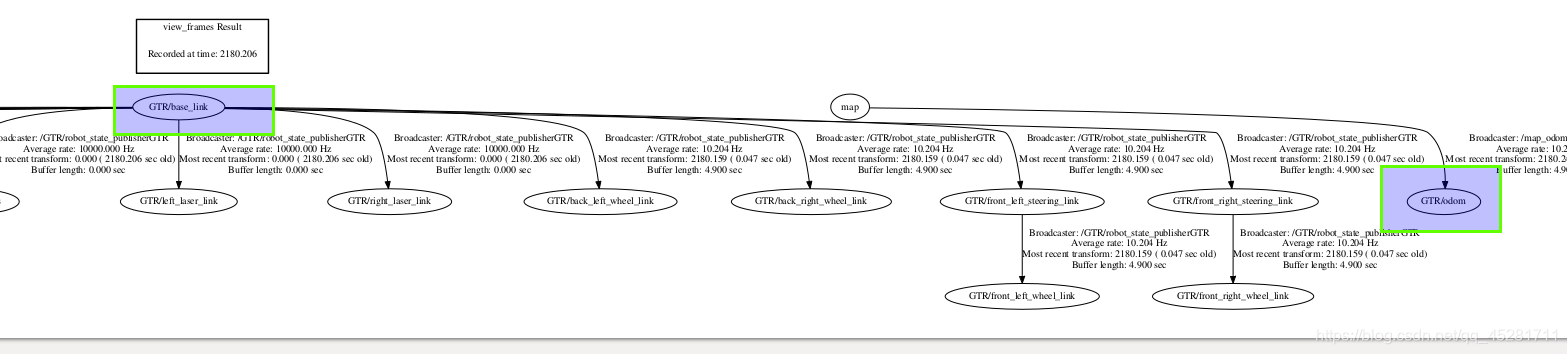
解决:
原因是frames没有在一个tree上,可以在 model_display.launch中模拟发布odom -> base_link ,代码如下:
<node pkg="tf" type="static_transform_publisher" name="map_odom_broadcaster" args="0 0 0 0 0 0 map $(arg robot_name)/odom 100" />
<node pkg="tf" type="static_transform_publisher" name="map_odom_broadcaster1" args="0 0 0 0 0 0 $(arg robot_name)/odom $(arg robot_name)/base_link 100" />
(2) 若tf没有问题则要看一下rviz的启动文件是否与topic相对应。
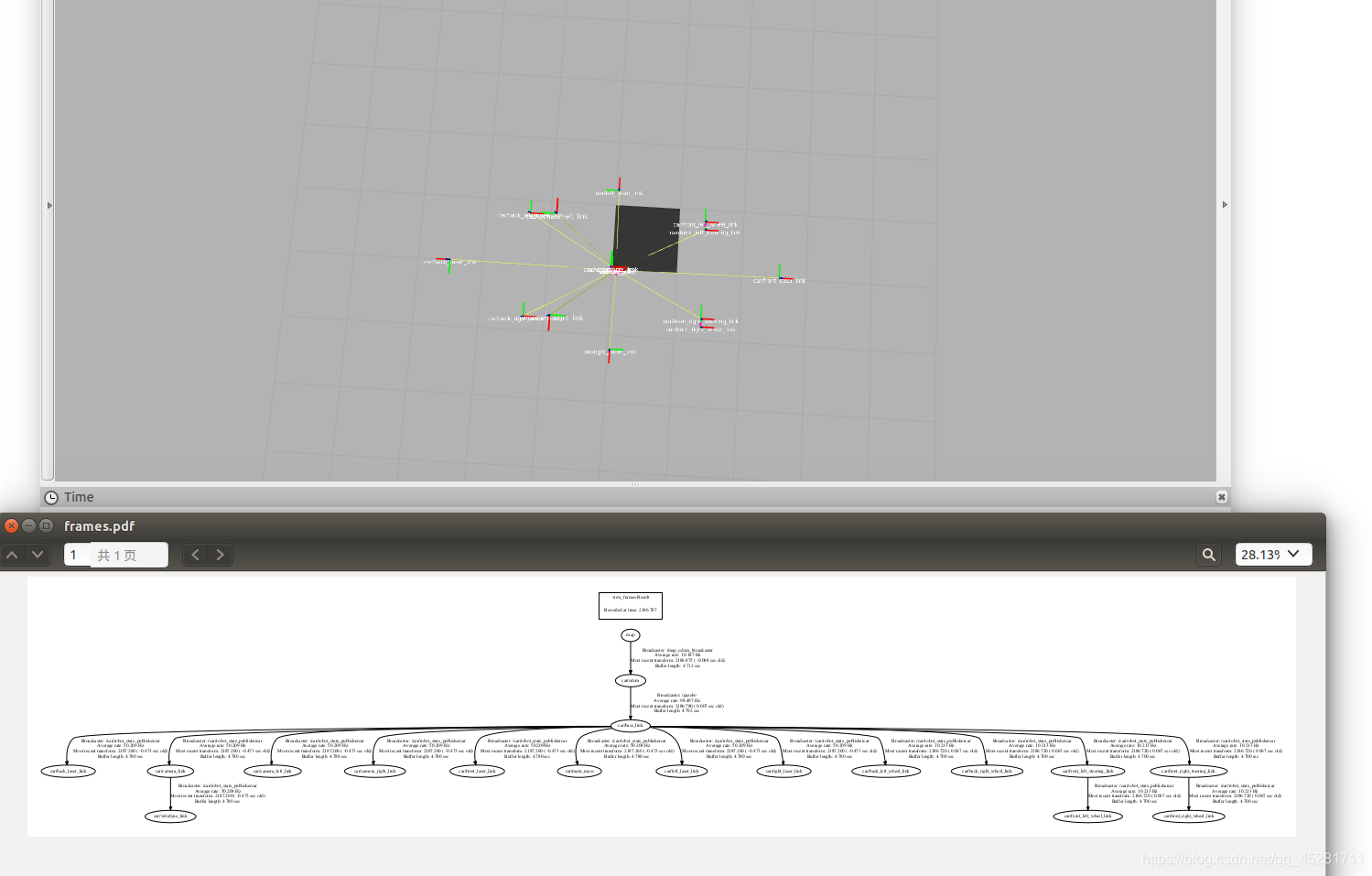
解决:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









