







 本文详细介绍了VINS系统中残差项的构建,包括先验残差项和IMU测量残差。在IMU测量残差部分,文章讨论了如何构建残差和协方差矩阵,特别是对速度、姿态和旋转矩阵预积分量的递推形式。通过泰勒展开的误差传递方法,推导了IMU测量噪声协方差的递推形式。
本文详细介绍了VINS系统中残差项的构建,包括先验残差项和IMU测量残差。在IMU测量残差部分,文章讨论了如何构建残差和协方差矩阵,特别是对速度、姿态和旋转矩阵预积分量的递推形式。通过泰勒展开的误差传递方法,推导了IMU测量噪声协方差的递推形式。
一. VINS系统的残差项
1.1 先验残差项
1.2. IMU测量残差
仅仅是把预积分量当作构建残差的一把梯子而已。
IMU预积分类——IntegrationBase_yuntian_li的博客-优快云博客
残差里面的待优化变量:i时刻的
j时刻的
由于构建残差项时,通用形式是,因此,构建这部分残差分为两个任务:
(1)构建IMU测量残差
(2)构建对应的协方差矩阵
,用于残差项的比例分配,一个变量越准确,其方差值越小,那么其逆越大,就越相信这个变量所产生的残差。
1.2.1 构建残差
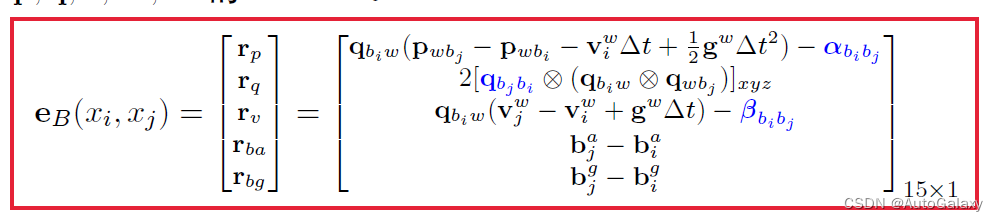
(1.2.1.1)
蓝色项是测量值,另一部分黑色项是估计值
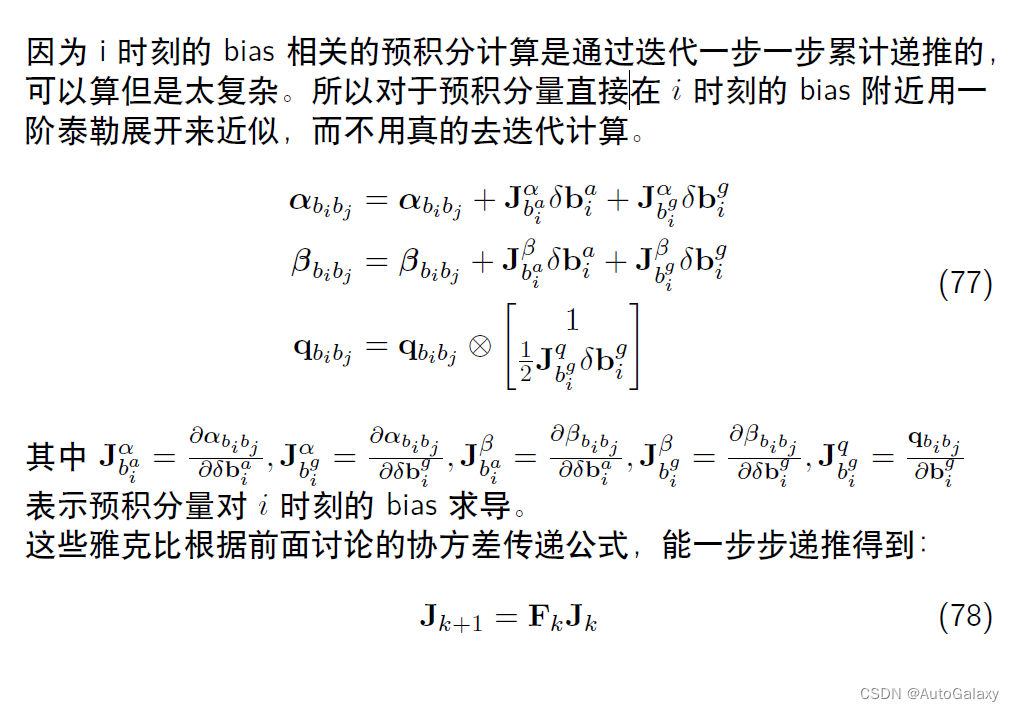
注意:这里直接给出各预积分量对
的雅可比求法
这里解释一下递推得到
,注意,有
根据式(1.2.2.20),我们可以知道我们会依次计算
而
很显然有:
(下标或者有点不一样,但是大致是这个道理)
其他的依次类推。
接下来对(1.2.1.1)求雅可比,注意只需要对估计值部分求雅可比,测量值部分相当于一个具体的数,也只有估计值部分含有我们要求导的状态变量。
接下来只需要对除开的状态变量求雅可比就行。
(1)速度项残差的雅可比:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2373
2373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









