







 本文详细介绍了VINS流程,包括特征点相关操作,如用OpenCV库函数进行特征点提取、匹配和一致性检测;关键帧保存特征点、计算描述子及位姿等信息;四自由度优化需关键帧有回环且为划窗内第一帧;还说明了添加关键帧的条件,并给出了流程图。
本文详细介绍了VINS流程,包括特征点相关操作,如用OpenCV库函数进行特征点提取、匹配和一致性检测;关键帧保存特征点、计算描述子及位姿等信息;四自由度优化需关键帧有回环且为划窗内第一帧;还说明了添加关键帧的条件,并给出了流程图。
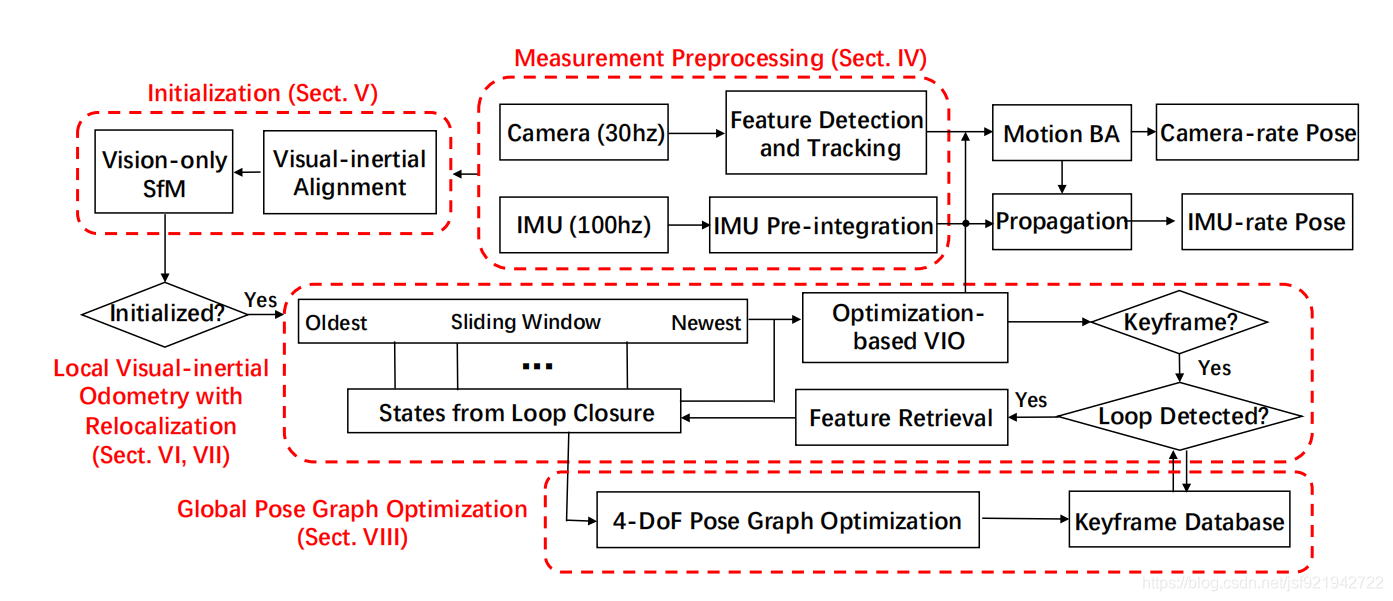
VINS 流程
流程中的细节
特征点相关
- 图像特征点提取是通过调用opencv库的goodFeaturesToTrack函数实现
- 图像间的特征点匹配是通过opencv库的calcOpticalFlowPyrLK函数实现,光流法实现匹配
- 匹配点的一致性检测是通过opencv库的cv::findFundamentalMat函数实现
- 特征点检测是每隔2帧进行一次特征点检测
- 光流跟踪是每一帧都需要进行
关键帧相关
- 关键帧保存的特征点有:光流跟踪到的特征点和根据图像进行fast角点提取的角点
- 关键帧会对特征点计算brief描述子,用来回环检测
- 关键帧中会保存两种位姿 1. 划窗优化后的位姿(四自由度优化使用) 2. 划窗优化后或四自由度优化后再作用drift矩阵后的位姿(显示使用)
- 如果有回环,记录回环帧对应的序号
四自由度优化
- 关键帧中必须有回环
- 并且该关键帧必须是划窗内的第一帧
添加关键帧的条件
- 初始化必须完成
- 划窗移动必须移除的是OLD帧
- 特征点检测的基础上并且满足上一条件,计数为3添加关键帧
流程图

















 609
609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









