




 博主在使用Autolabor进行自动驾驶研究时遇到了多个技术问题,包括tf树错误、缺少odom到base_link的tf关系、雷达启动失败、换源失败以及rviz无法打开。通过一系列排查和解决步骤,如切换Python环境、调整硬件连接、更新源文件和查找适配驱动,部分问题得到了解决。然而,rviz问题最终被怀疑为驱动问题,但未能找到合适的解决方案。博主计划重新烧录系统镜像以继续解决这一难题。
博主在使用Autolabor进行自动驾驶研究时遇到了多个技术问题,包括tf树错误、缺少odom到base_link的tf关系、雷达启动失败、换源失败以及rviz无法打开。通过一系列排查和解决步骤,如切换Python环境、调整硬件连接、更新源文件和查找适配驱动,部分问题得到了解决。然而,rviz问题最终被怀疑为驱动问题,但未能找到合适的解决方案。博主计划重新烧录系统镜像以继续解决这一难题。
这两天依旧遇到了一些令人无语的情况。rviz崩了无法启动。
1. tf树打不开,rqt_tf_tree报错,无法打开。
解决方法:更改python环境。
sudo update-alternatives --config python
选择python2版本才行。
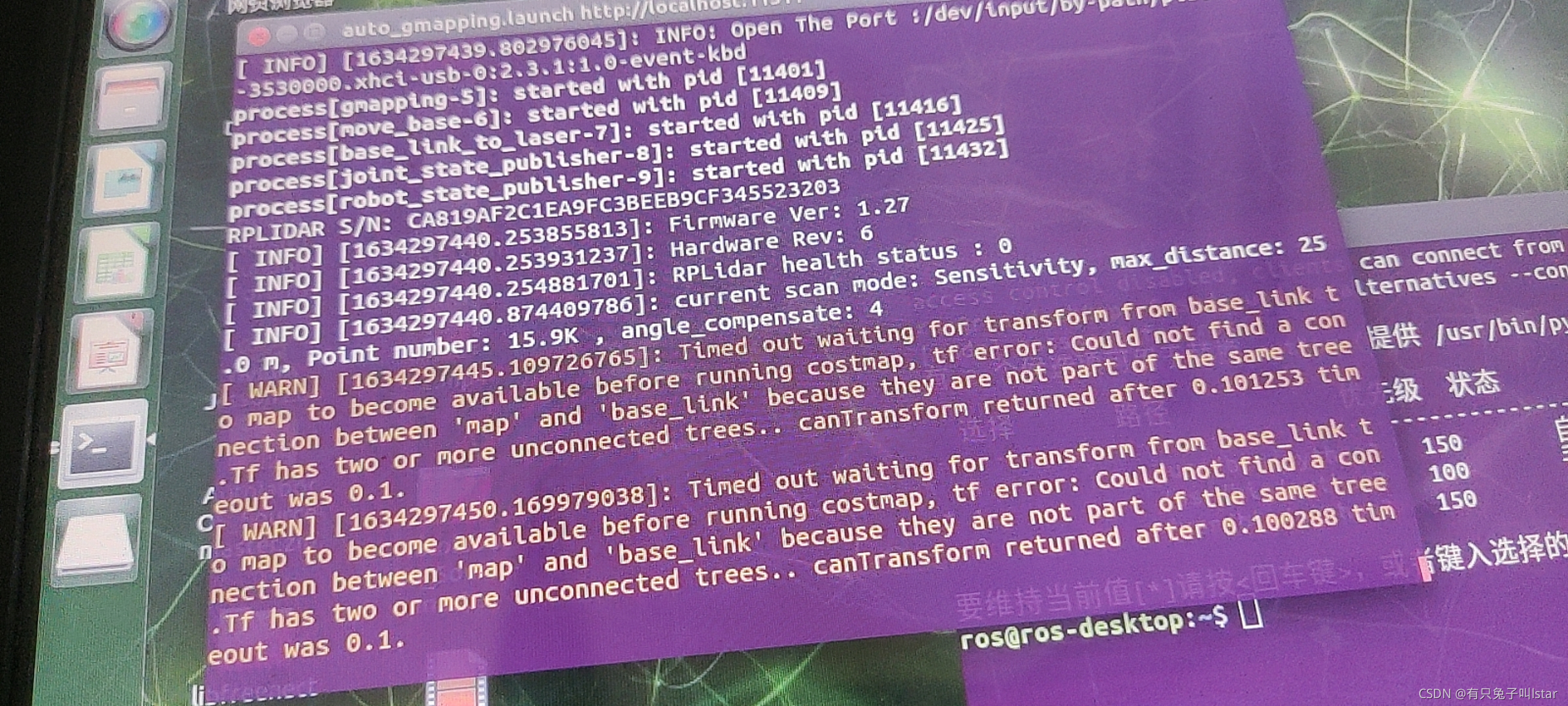
2. 检查话题为map->odom,baselink->laser,没有odom到base_link。
gmapping只发布了map到odom的tf关系,导致baselink和odom断连。
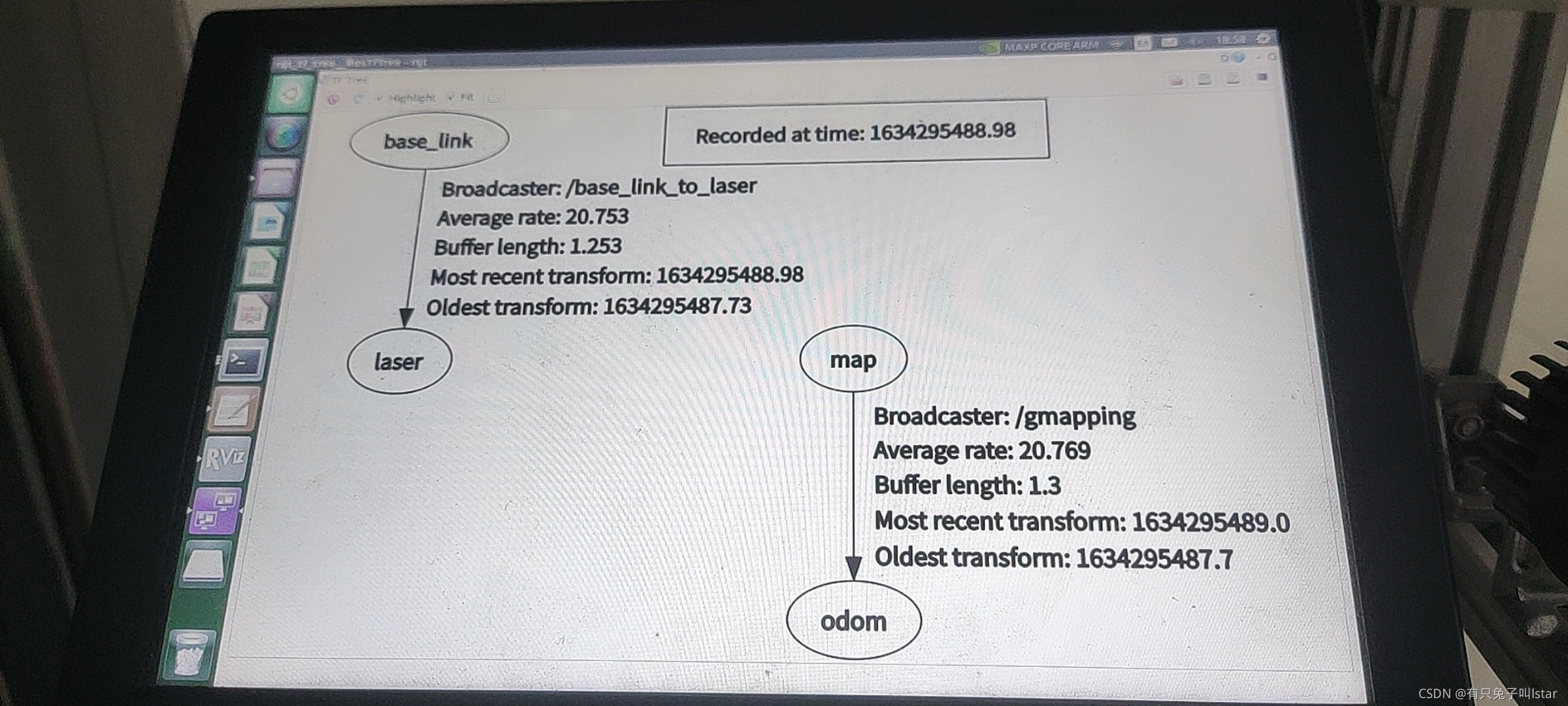
可以查看这篇文章 map,odom,base_link,base_laser坐标系 - 古月居 。检查odom话题发现确实没有发送数据。但是现在因为rviz崩了所以一直没有调试出来,但是今天最后在充电的时候发现,autolabor串口线没插上。。。所以估计是这个导致的。等解决了rviz之后再看吧。
3. cannot start scan 800800,雷达启动失败。
 查了谷歌,最后猜测是布线的问题,把雷达线直接通过扩展坞接到tx2上,而不是扩展坞->扩展坞->雷达,果然解决了。确实是供电的问题。
查了谷歌,最后猜测是布线的问题,把雷达线直接通过扩展坞接到tx2上,而不是扩展坞->扩展坞->雷达,果然解决了。确实是供电的问题。
4. 换源一直失败,update之后一直报之前源的错误。
查看这个文章,发现确实还有一个source文件,是ros的source文件,找到他,根据第二篇博客更新他,就好了。执行sudo apt-get update时,不再含有release文件问题解决_A little point的博客-优快云博客 ROS Melodic 版本安装+将ROS的源设置为国内的源_dckwin的博客-优快云博客
5. rviz打不开。这几天一直遇到的大问题。谷歌查了很多,总结猜测是驱动问题,但是尝试了很多方法都没有用。
首先查看显卡型号lspci发现是空的。
ubuntu-drivers也是空的。
sudo add-apt-repository ppa:graphics-drivers
sudo apt-get update
#sudo apt-cache search nvidia-*我直接apt-get install nvidia*尝试了也不行。
最后去找additional drivers附加驱动,发现找不到software&update,于是又去查怎么下这个,安装了apt-get install software-center后依旧没有,且执行software-center说命令不存在,于是又查找,最后根据这篇解决的Can't Find the Ubuntu Software Center After upgrade to Ubuntu 18.04 - Ask Ubuntu。
安装上了后打开,发现additional drivers是空的。。。。没有办法选择其他的显卡驱动。。。
心态崩了。
询问了师兄师姐之前也没遇到过这个问题,问了autolabor的技术支持,给的建议是重新烧录镜像,本来准备今晚弄完的,结果系统没电了。。。明天再接着弄把。


















 2217
2217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









