






 本文详细介绍如何使用ROS与LSD-SLAM进行点云视觉处理。首先通过.bag文件实时运行SLAM,随后利用.png图片集进行离线SLAM处理。文章中还解决了QObject::startTimer:Timerscannotbestartedfromanotherthread的问题。
本文详细介绍如何使用ROS与LSD-SLAM进行点云视觉处理。首先通过.bag文件实时运行SLAM,随后利用.png图片集进行离线SLAM处理。文章中还解决了QObject::startTimer:Timerscannotbestartedfromanotherthread的问题。
1 使用 .bag文件
roscore
//打開ros
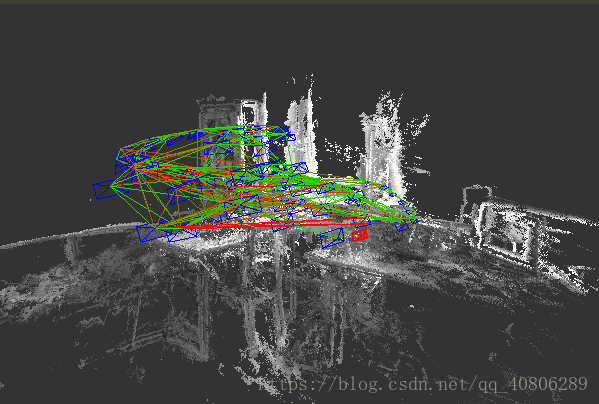
rosrun lsd_slam_viewer viewer
//打開點暈視圖
rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info
//採用實時slam
rosbag play LSD_room.bag
//打開bag文件
2 使用 .png圖片集
roscore
rosrun lsd_slam_viewer viewer
rosrun lsd_slam_core dataset_slam _files:=/home/bdf/rosbuild_ws/LSD_room/images _hz:=0 _calib:=/home/bdf/rosbuild_ws/LSD_room/cameraCalibration.cfg
问题:QObject::startTimer: Timers cannot be started from another thread
解决:lsd_slam_core/src/util/settings.cpp: bool displayDepthMap = false;

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









