







Carla实现跟车模型
1. 需求说明
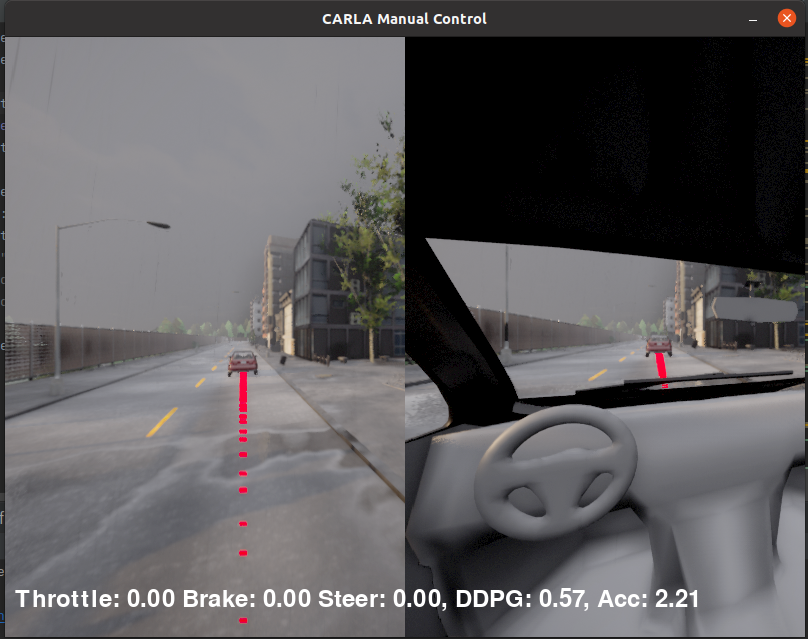
本文实现在Carla仿真环境中的跟车模型,具体为在仿真环境中放置两个车辆,前车与后车,通过 Carla API设置前车的自动驾驶模式,然后我们通过编程手段实现后车跟随前车的路线行动,目前有两种手段完成,第一种为使用安全距离以及速度差的方式驱动油门和刹车,逼近方法是PID;第二种手段是同样设置后车的自动驾驶模式,但是接管自动驾驶车辆的路口转向的自由,将其路口出路的选择变为前车所选择的路口而不是随机选择。
> Carla Python API 版本:0.9.13
>
> Python API:3.7.12
2. 跟车实现
### 2.1 类设计以及源码
在环境类的设计中,参数debug指定模式,实际上就是采用同步方式还是异步方式运行Carla,采用同步方式会逐帧处理所需要的逻辑。参数mode指定驱动模式,有两个参数可以选择,分别是auto和pid,其中auto模式为Carla自带自动驾驶API,但是其不能直接用于跟车模型,因为岔路口的道路选择策略是随机的。PID的方式是根据设定的安全距离和当前速度,进行PID的油门/刹车逼近。源码如下:
class Env:
def __init__(self, client, world, tau=0.1):
self.client = client
self.world = world
self.screen = None
self.camera_bp = None
self.mode = 'auto'
self.debug = False
self.green_light = True
self.front_image = np.zeros((600, 800, 3), dtype=np.uint8)
self.back_image = np.zeros((600, 800, 3), dtype=np.uint8)
self.camera_front = None
self.camera_back = None
self.warning_img = None
self.ego_vehicle = None # 后车
self.front_vehicle_bp = None # 前车
self.front_switch_road_waypoints = deque()
self.relative_distance = None
self.relative_speed = None
self.ego_speed = None
self.ego_acceleration = None
self.tau = 0.1
self.destination = None
self.control_flag = True
self.map = self.world.get_map()
self.spawn_vehicles()
self.frenet = FrenetCoordinateSystem(self.map.generate_waypoints(2.0))
# 初始化RSS参数
self.t_response = 3 # 反应时间 (s)
self.a_max_brake = 3 # 最大制动减速度 (m/s^2)
if self.debug is True:
settings = self.world.get_settings()
settings.synchronous_mode = True
settings.fixed_delta_seconds = 0.1
world.apply_settings(settings)
self.agent = BasicAgent(self.ego_vehicle)
self.front_agent = BasicAgent(self.front_vehicle_bp)
self.device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
self.ddpg = torch.load('/home/moresweet/gitCloneZone/DIRL/checkpoints/RSS/weights/ddpg_105.pt')
self.ddpg_acc = 0
self.cur_acc = 0
self.e2f_waypoints_queue = deque()
self.last_location1 = self.front_vehicle_bp.get_location()
self.last_location2 = self.ego_vehicle.get_location()
"""
生成carla场景
"""
def spawn_vehicles(self):
# 加载场景
blueprint_library = self.world.get_blueprint_library()
vehicle_bp = blueprint_library.filter('vehicle.*')[0]
vehicle_bp_rear = blueprint_library.filter('vehicle.*')[0]
spawn_points = self.world.get_map().get_spawn_points()
front_spawn_point = spawn_points[0]
# 获取前车的车道信息
front_waypoint = self.map.get_waypoint(front_spawn_point.location)
# 计算后车生成点(在前车后20米处)
distance = 10 # 距离前车20米
rear_location = front_waypoint.transform.location - front_waypoint.transform.get_forward_vector() * distance
rear_spawn_point = carla.Transform(rear_location, front_waypoint.transform.rotation)
# 创建前车和后车
self.front_vehicle_bp = self.world.spawn_actor(vehicle_bp, front_spawn_point)
self.ego_vehicle = self.world.spawn_actor(vehicle_bp_rear, rear_spawn_point)
pygame.init()
# 设置前车匀速行驶
self.front_vehicle_bp.set_autopilot(True)
if self.mode == 'auto':
self.ego_vehicle.set_autopilot(True)
pygame.init()
# 创建pygame窗口
self.screen = pygame.display.set_mode((800, 600))
pygame.display.set_caption("CARLA Manual Control")
# 设置前后相机视角
self.camera_bp = blueprint_library.find('sensor.camera.rgb')
self.camera_bp.set_attribute('image_size_x', '800')
self.camera_bp.set_attribute('image_size_y', '600')
self.camera_bp.set_attribute('fov', '110')
camera_transform_front = carla.Transform(carla.Location(x=1.5, y=0, z=2.4), carla.Rotation(yaw=30))
self.camera_front = world.spawn_actor(self.camera_bp, camera_transform_front, attach_to=self.ego_vehicle)
camera_transform_back = carla.Transform(carla.Location(x=-0.2, y=-0.2, z=1.3), carla.Rotation(yaw=28))
self.camera_back = world.spawn_actor(self.camera_bp, camera_transform_back, attach_to=self.ego_vehicle)
self.camera_front.listen(lambda image: self.front_camera_callback(image))
self.camera_back.listen(lambda image: self.back_camera_callback(image))
self.warning_img = pygame.image.load('./EARLY_WARNING.png')
self.warning_img = pygame.transform.scale(self.warning_img, (50, 50))
"""
相机图像处理
:param image: 相机图像
"""
def process_img(self, image):
array = np.frombuffer(image.raw_data, dtype=np.dtype("uint8"))
array = np.reshape(array, (image.height, image.width, 4))
array = array[:, :, :3]
array = array[:, :, ::-1]
return array
"""
摄像头回调函数
:param image: 相机图像
"""
def front_camera_callback(self, image) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 370
370

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











