



 这篇博客详细介绍了ROS的Client Library——rospy,包括rospy节点的创建,话题订阅与发布,服务的处理方式,参数管理和时间管理。rospy-Service中提到handler函数处理request并返回response,与roscpp的处理方式不同。此外,还讲解了如何使用rospy发起服务请求以及param和time的管理功能。
这篇博客详细介绍了ROS的Client Library——rospy,包括rospy节点的创建,话题订阅与发布,服务的处理方式,参数管理和时间管理。rospy-Service中提到handler函数处理request并返回response,与roscpp的处理方式不同。此外,还讲解了如何使用rospy发起服务请求以及param和time的管理功能。
rospy-Node
函数:
init_node(name) # 注册和初始化node
MasterProxy get_master() # 获取master的句柄
bool is_shutdown() # 返回是否关闭
on_shutdown(fn) # 在node关闭时调用函数
str get_node_uri() # 返回节点的URI
str get_name() # 返回本节点的全名
str get_namespace() # 返回本节点的命名空间
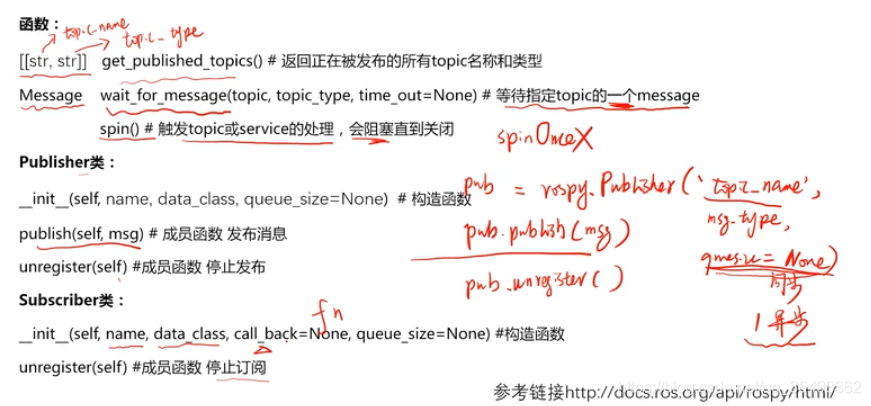
rospy-Topic
rospy-Service
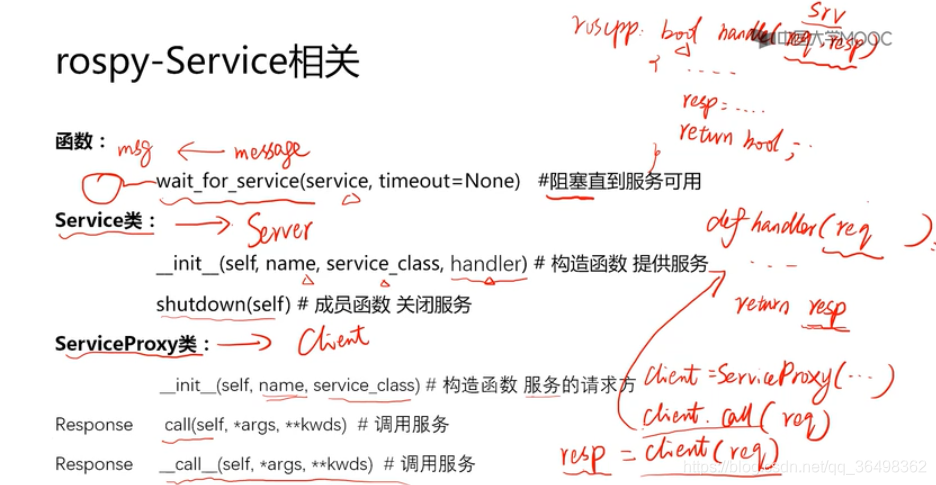
hanlder函数接收request,处理完之后返回一个response。与roscpp的处理函数不同,传入的是整个service,返回的是一个布尔值。
client有两种发起请求的方法。
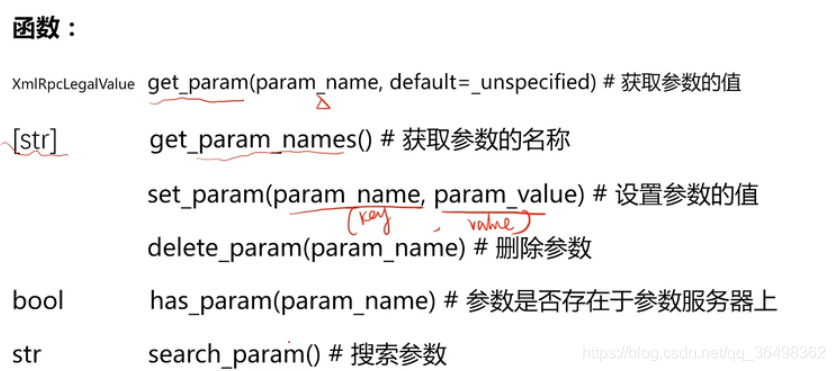
rospy-Param
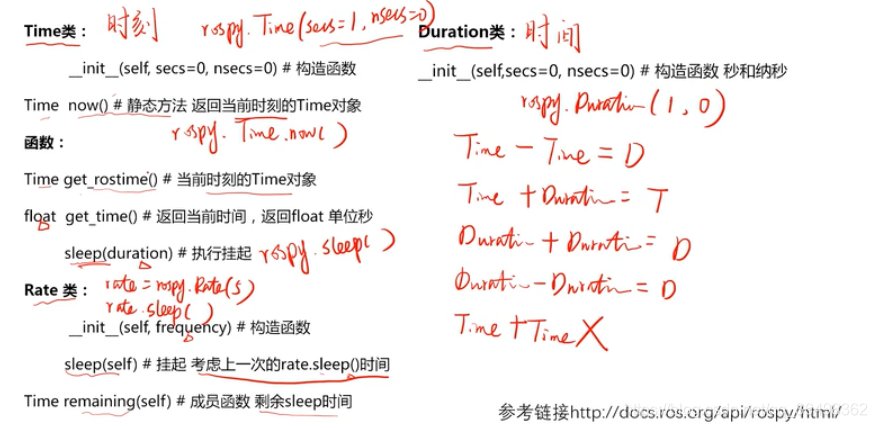
rospy-Time
Time类指时刻
Duration类指时间

















 2943
2943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









