






 本文介绍如何使用ROS参数服务器进行参数的存储与读取。包括查看服务器上的参数、获取特定参数值、保存所有参数到YAML文件及从YAML文件加载参数的方法。
本文介绍如何使用ROS参数服务器进行参数的存储与读取。包括查看服务器上的参数、获取特定参数值、保存所有参数到YAML文件及从YAML文件加载参数的方法。
不常改变的参数和配置放在参数服务器里,读写非常方便

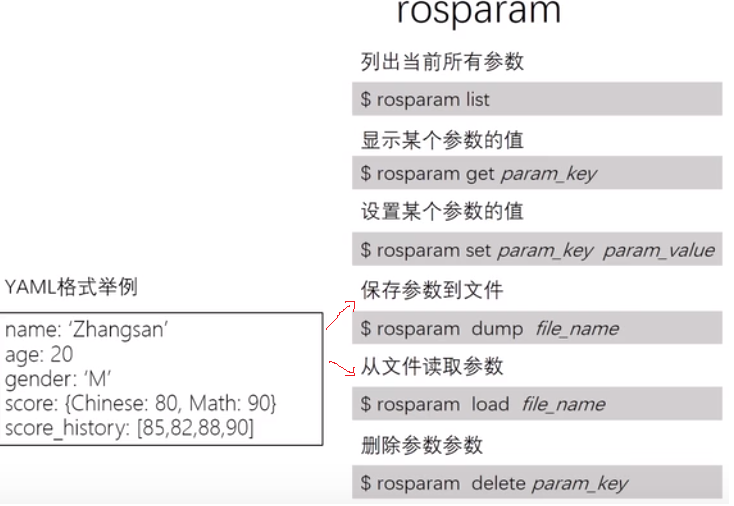
~$ rosparam list # 查看参数服务器上有哪些param
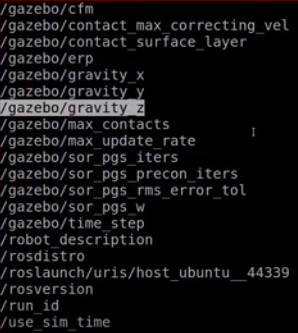
~$ rosparam get /gazebo/gravity_z # 查看重力常数
![]()
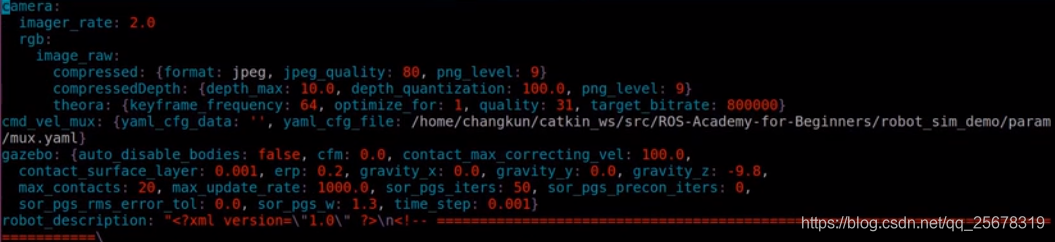
~$ rosparam dump test.yaml # 把当前所有参数存到yaml文件里
~$ ls
~$ vi test.yaml # 打开yaml文件
~$ rosparm load test.yaml # 加载

















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









