






 本文解决了在Ubuntu16.04环境下使用ROS进行gazebo仿真时遇到的catkin_make编译错误。通过安装或更新gazebo-ros-control功能包,成功解决了“Could not find a package configuration file provided by”错误。此外,还介绍了如何在线下载机器人模型文件,以确保仿真的顺利进行。
本文解决了在Ubuntu16.04环境下使用ROS进行gazebo仿真时遇到的catkin_make编译错误。通过安装或更新gazebo-ros-control功能包,成功解决了“Could not find a package configuration file provided by”错误。此外,还介绍了如何在线下载机器人模型文件,以确保仿真的顺利进行。
ubuntu16.04运行ros的时候编译工作空间catkin_make出现的一个问题Could not find a package configuration file provided by
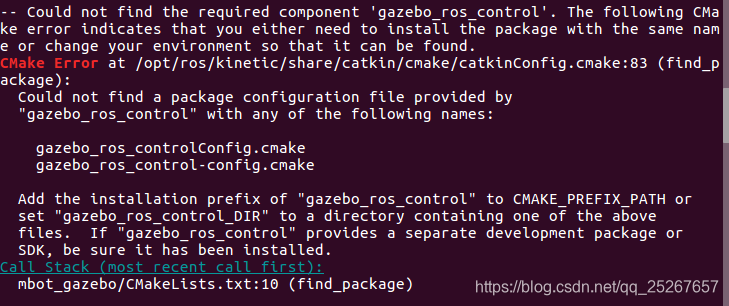
最近在进行ros里面的gazebo仿真之前需要对自己创建的工作空间进行编译,但是进行编译的时候输入catkin_make出现如下错误提示
查阅ROS问答社区之后发现两个比较有用的链接,如下
https://answers.ros.org/question/235846/did-ros-kinetic-gazebo-ros-control-package-release/
经过分析是没有安装或者更新gazebo-ros-control功能包,因此根据上面大神们的解答,我重新在终端运行sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control即可。
PS:在采用gazebo进行仿真的时候一定需要下载机器人模型文件,这样仿真才能成功,具体解决方法如下:
在根目录下,也就是HOME目录下,采用crtl+h可以看到隐藏目录,在.gazebo目录下新建一个models文件夹,然后参照这个大神的做法即可在线下载机器人模型文件库https://blog.youkuaiyun.com/qq_40213457/article/details/81021562

















 2147
2147

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









