







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:机器人曲线插值拟合算法研究现状简述(包含原文PDF百度云下载链接)


第二类算法是采用特殊曲线描述规划的轨迹,特殊曲线规划主要包含了直线-圆弧曲线和Clothoid曲线两种。
其中直线-圆弧曲线是指针对类车机器人运动约束问题,在给定两个位置矢量,仅使用圆弧(满足最小曲率)和直线段合成最短平滑的路径,Dubins曲线限定机器人仅能前向运动。如图 2.5所示,R&S曲线将其拓展为双向运动,由于其简洁性而多被后续研究集成应用到其他算法,如Hybrid A*[10]使用R&S曲线条件改善路径质量,CL-RRT[11]使用Dubins距离提升采样点生成“良率”。
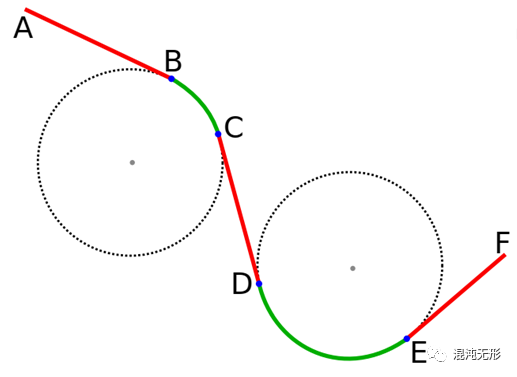
图 2.5 Dubins曲线[10]
Clothoid曲线的曲率随弧长线性变化,在轨迹平滑中极具优势,如Kim等人提出了一种基于Clothoid曲线的移动机器人运动规划算法,不仅缩短了路径长度,也降低了曲率变化量[12]。
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:(包含原文PDF百度云下载链接)
优快云下载链接:机器人曲线插值拟合算法研究现状简述如果喜欢的话,可以关注我,阅读更多有趣好文!
微信公众号:混沌无形
知乎号:混沌无形
B站:混沌无形R



















 9679
9679

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











