






 本文详细介绍了在Simulink中创建和封装子系统的方法,包括从空白模型和现有模型创建子系统,以及如何使用封装功能美化和优化模型结构。通过实例演示了如何设置子系统图标、参数和文档,提高模型的可读性和可维护性。
本文详细介绍了在Simulink中创建和封装子系统的方法,包括从空白模型和现有模型创建子系统,以及如何使用封装功能美化和优化模型结构。通过实例演示了如何设置子系统图标、参数和文档,提高模型的可读性和可维护性。
我们既然要使用Simulink,就不是针对于一些简单的仿真去的。所以仿真模型一般都比较复杂,规模很大,包含了数量众多的各种模块。如果把这些模块都放在一个模型编辑窗口中,会显得臃肿、杂乱不堪,不利于编辑和分析。所以我们要把完成某些功能的模块单独封装成一个个子系统,最后再用一个模型文件调用这些子系统,类似于编程中的函数封装再调用。这样可以使模型变得简洁。
一、从空白模型创建子系统
1、新建一个空白模型
2、添加“Simulink”-“Ports & Subsystems”-“Subsystem”模块

3、双击Subsystem模块进入子模块编辑窗口,该窗口已自带了一个子模块的输入和输出端子,名为In1、Out1,输入和输出端子是子模块与外界联系的端口。
![]()
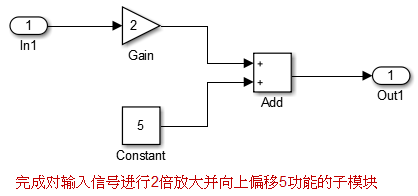
4、使用模块和信号线实现子模块的功能。
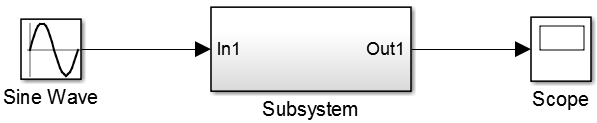
5、完成子模块功能的编辑后,点返回上级按钮,进行剩下功能的搭建
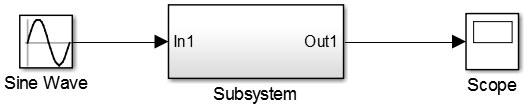
6、添加信号源和示波器,仿真即可。
二、从已有模型创建子系统
如果模型已经建立完毕,但是比较混乱,需要把部分模块封装成子系统。
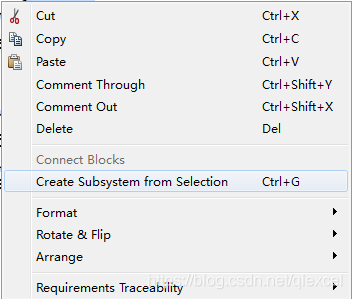
1、选中要组合成子系统的所有对象,包括模块和连线。
2、右键“Create Subsystem from Selection”,选中的部分就会自动生成子系统。
三、子系统的封装
所谓封装(Mask),就是将SIMULINK的子系统“包装”成一个模块,并隐藏全部的内部结构。访问该模块时只出现了一个参数设置对话框,模块中所有需要设置的参数都可通过该对话框来统一设置。
1、选中目标子系统,右键“Mask”-“Create Mask”
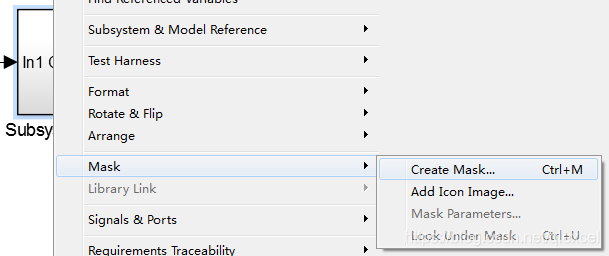
之后会弹出子系统封装的属性设置:

利用此窗口对封装的图标、参数、初始化和文本进行设置。下面介绍4个标签页的功能。
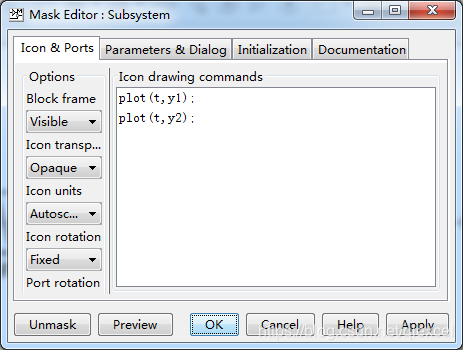
2、Icon & Ports(图标和端口)标签页

用来给封装模块设计自定义图标。“Icon drawing commands”命令窗口以MATLAB语句来绘制图标的编辑区,通过在“Icon drawing commands”命令窗口中填写函数设置封装模块的图标。图标标签页的常用绘制命令如下:

3、Parameters & Dialog(参数)标签页
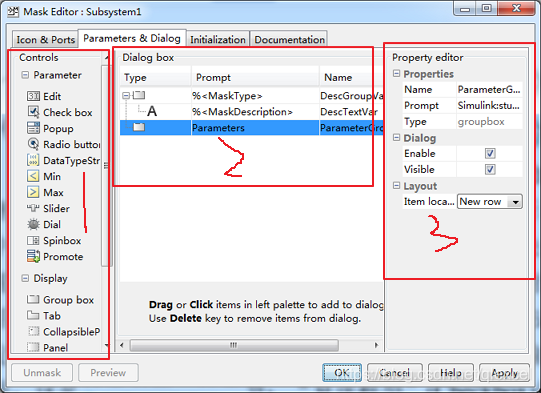
最关键的标签页,可增加或删除子系统参数对话框中的变量以及属性。
在上图的框1中选择要添加变量的类型:Edit(可编辑型,即该变量可由用户自定义输入数据,这是最普遍的一种类型);Checkbox(复选框型,指定输入数据为复选框类型,即用户只能进行选中与否的设置);Popup(下拉菜单型,指定输入数据为下拉菜单类型,即输入数据不可编辑,只能在下拉菜单提供的选项中选择)等。
框2中显示当前子系统的变量信息,包括Type(变量类型)、Prompt(变量说明,封装后根据这个来分辨不同的变量)、Name(变量名,与子系统中的变量名相同,且一一对应)。
框3中显示当前变量的属性。
4、Initialization(初始)标签页
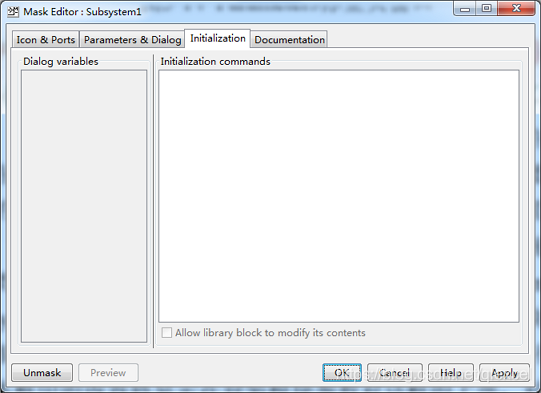
通过命令函数,允许用户在调用子系统前通过MATLAB命令窗口进行子系统参数值的初始设定,还可以对图标绘制函数初始的值进行设置。
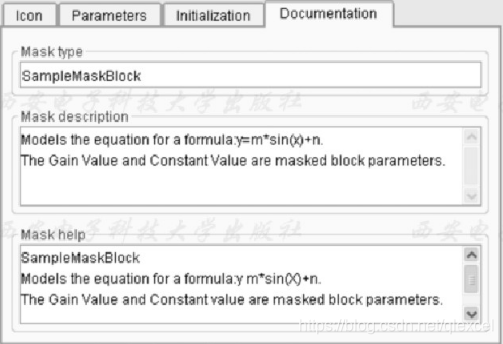
5、Documentation(文本)标签页
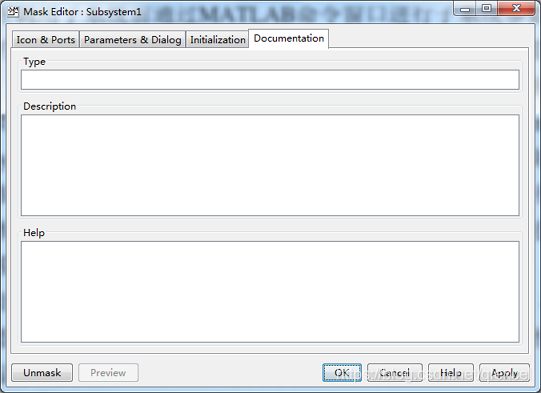
可设定封装子系统的类型、描述和帮助等文字说明。其中,“封装类型”( type)文本框中的内容将作为模块的类型显示在封装模块的参数对话框中;“封装模块描述”(description)多行文本框中的内容将显示在封装模块参数对话框的上部,对封装模块的功用和其它注意事项进行描述;“封装模块帮助”(help)多行文本框中输入关于该模块的帮助,在参数对话框中的“help”按键按下时,MATLAB的帮助系统将显示此封装模块帮助多行文本框中的内容。
四、一个子系统封装的例子
要求:创建一个子系统,功能为:y=m*sin(x) +n ,并进行封装。
1、建立模型:
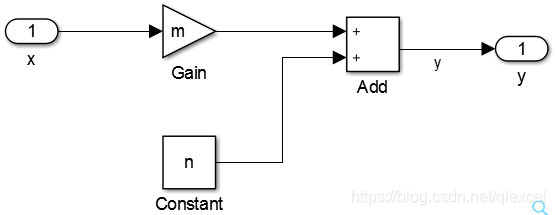
可以看到模型中有两个变量:m和n,分别位于Gain模块和Constant模块。
2、封装子系统,设置标签页。我们想把子系统的图标设计成下面这样:

表示对波形的放大和偏移。一般Icon & Ports(图标和端口)标签页中只放绘图的命令,可是绘图需要的数据从哪来呢?从
Initialization(初始)标签页中来。于是我们先在Initialization(初始)标签页中生成绘图需要的数据。
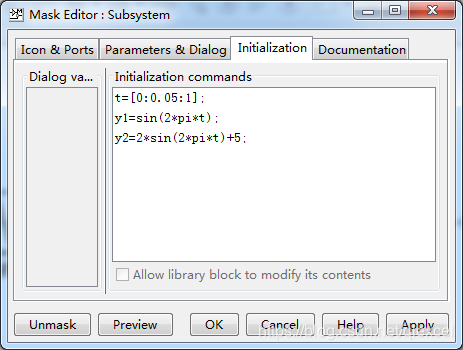
然后在Icon & Ports(图标和端口)标签页中使用前面的绘图数据来绘图:
点击确定,就可以看到刚刚的设置已经生效了:

3、设置变量

添加两个Edit类型的变量,可以在变量属性中对变量初值就行设置。点击确定后,再双击子系统的图标,就会出现:
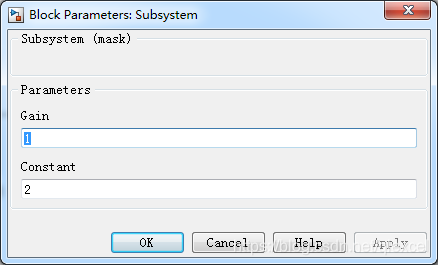
设置变量m和n的值,提示框中只会出现Prompt,因此prompt要命名好,不然变量太多,不好分辨。
4、在Documentation(文本)标签页中,把子系统的说明信息填完整。
5、4个标签页设置完成,子系统就封装完成。接下来直接使用即可。如果要修改放大值和偏移值,不用像没有封装那样,点开子系统去修改里面的模块,直接双击图标,修改变量即可,方便不少。


















 4187
4187

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











