




 本文探讨了G2O库中不同的初始化方法对优化结果的影响,通过源码解析和编程验证,比较了使用生成树和里程计进行初始猜测的效果。
本文探讨了G2O库中不同的初始化方法对优化结果的影响,通过源码解析和编程验证,比较了使用生成树和里程计进行初始猜测的效果。
G2O initial guess 方法的选择
〇、前言
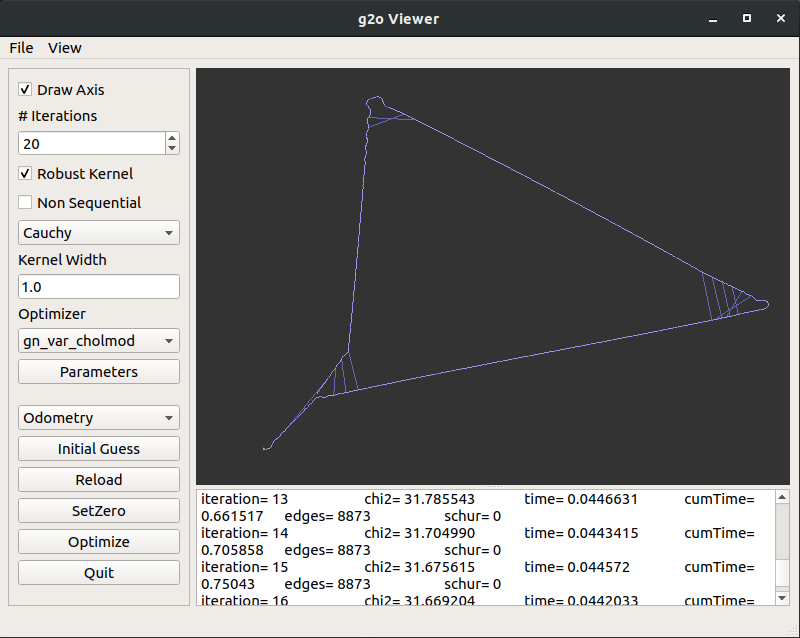
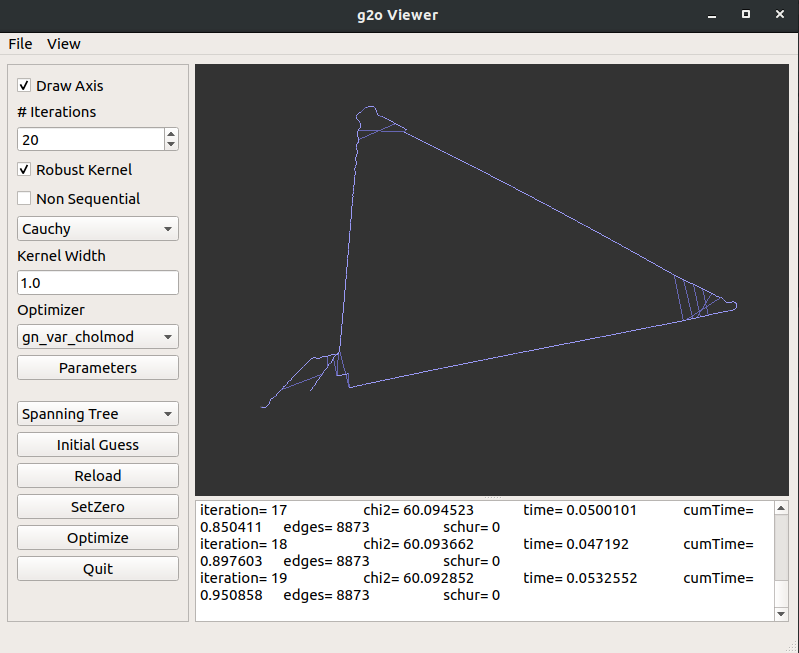
由于不同优化初始化方法会对g2o的结果产生影响,如下图所示,在勾选Robust Kernel的条件下:using initial guess from spanning tree 和 using initial guess from odometry 在其他设置相同的情况下得到的优化结果差别很大。因此我们希望可以通过程序来选择合适的优化初值设置方法。
PS:这里产生差异的原因和是否勾选Non Sequential也相关,用spanning tree初始化时若勾选Non Sequential会得到与左图相同的结果,而No Sequential的意思是只把回环边设置为鲁棒核
一、查看对应源码
由于没有搜索到相关资料,所以最好的方式就是查看g2o_viewer的源码。(同样的事已经做过一次,只是记性不好,这也是写这篇博客的原因)。
首先通过QT Designer查到对应下拉框的名字叫cbxIniitialGuessMethod,按钮btnInitialGuess

再找到对应的响应函数,然后就是我们需要的代码。
void MainWindow::on_btnInitialGuess_clicked()
{
if (viewer->graph->activeEdges().size() == 0)
viewer->graph->initializeOptimization();
switch (cbxIniitialGuessMethod->currentIndex()) {
case 0:
// spanning tree
viewer->graph->computeInitialGuess();
break;
case 1:
// odometry
{
EstimatePropagatorCostOdometry costFunction(viewer->graph);
viewer->graph->computeInitialGuess(costFunction);
}
break;
default:
cerr << __PRETTY_FUNCTION__ << " Unknown initialization method" << endl;
break;
}
viewer->setUpdateDisplay(true);
viewer->update();
}
二、编程验证
2.1 g2o_test.cpp
#include <iostream>
#include <fstream>
#include <stdio.h>
#include <vector>
#include <numeric>
#include <sstream>
//用于构建和计算图优化 g2o
#include <g2o/types/slam3d/types_slam3d.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1885
1885

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









