




一、基本任务切换实现
1.1 任务是什么
1.1.1 任务的外观
是一个永不返回的函数。要求无返回值,单个void* 参数,永不返回。
void taskNEntry(void *param)
{
// 初始化代码
while(;;)
{
// 应用代码
}
}1.1.2任务的内在
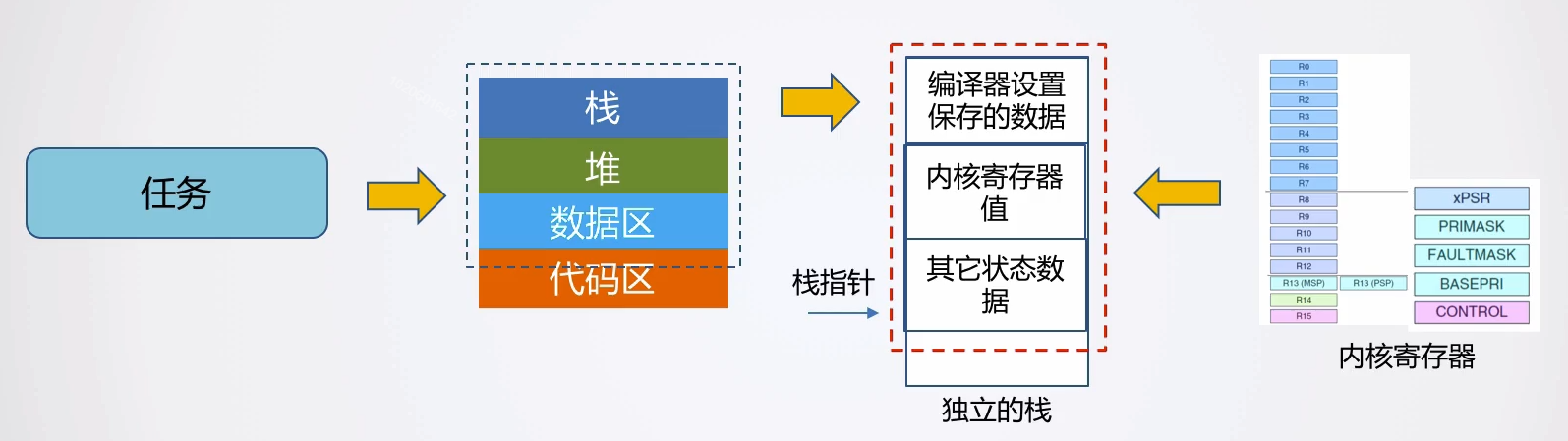
一个函数的执行依赖于堆栈、数据区和代码区的空间。当其转化为汇编之后,内核寄存器使用由编译器自动控制。

1.2 任务切换的本质
任务切换的本质是保存前一任务的当前运行状态,恢复后一任务之前的运行状态。
其中,每个任务需要保存和恢复的数据有:
- 数据区和代码区:已经由编译器分配好了,每个任务 (函数) 各不冲突,这个不需要我们手动去挪移。
- 堆:不使用
- 栈:硬件支持两个堆栈 MSP 和 PSP。
- 内核寄存器:编译器会在某些时候将部分。
1.3 任务切换原理
其切换任务的原理就是单独使用一个数组,保存每个任务的栈和内核寄存器的值。
如果我们要将一个后台任务切换到前台,就将数组内的数据内容恢复到栈和内核寄存器。
如果我们要将一个前台任务切换到后台,就将栈和内核寄存器指定的数据保存到数组。
1.4 堆栈详解
对于这个 task1 任务:
void task1(void) {
int a = 123; // 局部变量
int b = 456; // 局部变量
}
在这个这个函数未进入中断,其栈空间有:
高地址 ↑
──────────────────────────
| 局部变量 b = 456 |
| 局部变量 a = 123 |
──────────────────────────
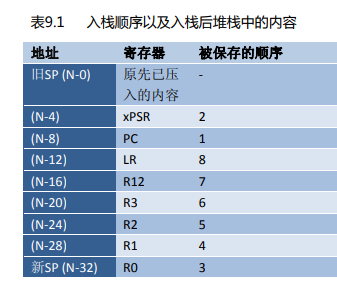
低地址 ↓此时,突然进入中断后,内核切换到 MSP 指针,此时 PSP 指针内容在原有的内容后,自动压栈下面这些内容:
高地址 ↑
───────────────────────────
| 局部变量 b = 456 |
| 局部变量 a = 123 |
| 保存的寄存器(函数内部) |
| 返回地址(LR) |
| xPSR | ← 中断自动保存
| PC |
| LR |
| R12 |
| R3 |
| R2 |
| R1 |
| R0 |
───────────────────────────
低地址 ↓ ← MSP 指向栈顶此时我们再将没有自动保存的 R4~R11 保存进 R0 寄存器后面, 之后把整个 PSP 寄存器器保存到数组内即可。
1.4 编码实现
1.4.1定义堆栈数据类型
首先定义任务堆栈的数据类型,为uint32_t
// Cortex-M的堆栈单元类型:堆栈单元的大小为32位,所以使用uint32_t
typedef uint32_t tTaskStack;1.4.2 定义任务类型
定义一个任务块结构体,其内容就是任务堆栈的指针
// 任务结构:包含了一个任务的所有信息
typedef struct _tTask {
// 任务所用堆栈的当前堆栈指针。每个任务都有他自己的堆栈,用于在运行过程中存储临时变量等一些环境参数
// 在tinyOS运行该任务前,会从stack指向的位置处,会读取堆栈中的环境参数恢复到CPU寄存器中,然后开始运行
// 在切换至其它任务时,会将当前CPU寄存器值保存到堆栈中,等待下一次运行该任务时再恢复。
// stack保存了最后保存环境参数的地址位置,用于后续恢复
tTaskStack * stack;
}tTask;1.4.4 初始化任务函数
将任务的堆栈地址,传入任务的参数和函数的入口函数都传给初始化函数中。
在初始化任务时只需要给默认堆栈寄存器赋值即可,但是一定要按照切换任务堆栈顺序操作。
在其中我们将 R4-R11 寄存器最后入栈,这是我们手动实现的。所以需要最后入栈。
R1、R2、R3、R12、R14、XPSR 则需要按这个顺序压栈初始化,因为这是 ARM 中断自动弹出到指定寄存器的。
/**********************************************************************************************************
** Function name : tTaskInit
** Descriptions : 初始化任务结构
** parameters : task 要初始化的任务结构
** parameters : entry 任务的入口函数
** parameters : param 传递给任务的运行参数
** Returned value : 无
***********************************************************************************************************/
void tTaskInit (tTask * task, void (*entry)(void *), void *param, uint32_t * stack)
{
// 为了简化代码,tinyOS无论是在启动时切换至第一个任务,还是在运行过程中在不同间任务切换
// 所执行的操作都是先保存当前任务的运行环境参数(CPU寄存器值)的堆栈中(如果已经运行运行起来的话),然后再
// 取出从下一个任务的堆栈中取出之前的运行环境参数,然后恢复到CPU寄存器
// 对于切换至之前从没有运行过的任务,我们为它配置一个“虚假的”保存现场,然后使用该现场恢复。
// 注意以下两点:
// 1、不需要用到的寄存器,直接填了寄存器号,方便在IDE调试时查看效果;
// 2、顺序不能变,要结合PendSV_Handler以及CPU对异常的处理流程来理解
*(--stack) = (unsigned long)(1<<24); // XPSR, 设置了Thumb模式,恢复到Thumb状态而非ARM状态运行
*(--stack) = (unsigned long)entry; // 程序的入口地址
*(--stack) = (unsigned long)0x14; // R14(LR), 任务不会通过return xxx结束自己,所以未用
*(--stack) = (unsigned long)0x12; // R12, 未用
*(--stack) = (unsigned long)0x3; // R3, 未用
*(--stack) = (unsigned long)0x2; // R2, 未用
*(--stack) = (unsigned long)0x1; // R1, 未用
*(--stack) = (unsigned long)param; // R0 = param, 传给任务的入口函数
*(--stack) = (unsigned long)0x11; // R11, 未用
*(--stack) = (unsigned long)0x10; // R10, 未用
*(--stack) = (unsigned long)0x9; // R9, 未用
*(--stack) = (unsigned long)0x8; // R8, 未用
*(--stack) = (unsigned long)0x7; // R7, 未用
*(--stack) = (unsigned long)0x6; // R6, 未用
*(--stack) = (unsigned long)0x5; // R5, 未用
*(--stack) = (unsigned long)0x4; // R4, 未用
task->stack = stack; // 保存最终的值
}1.4.5 任务切换函数
/**********************************************************************************************************
** Function name : PendSV_Handler
** Descriptions : PendSV异常处理函数。很有些会奇怪,看不到这个函数有在哪里调用。实际上,只要保持函数头不变
** void PendSV_Handler (), 在PendSV发生时,该函数会被自动调用
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
__asm void PendSV_Handler ()
{
IMPORT currentTask // 使用import导入C文件中声明的全局变量
IMPORT nextTask // 类似于在C文文件中使用extern int variable
MRS R0, PSP // 获取当前任务的堆栈指针
CBZ R0, PendSVHandler_nosave // if 这是由tTaskSwitch触发的(此时,PSP肯定不会是0了,0的话必定是tTaskRunFirst)触发
// 不清楚的话,可以先看tTaskRunFirst和tTaskSwitch的实现
STMDB R0!, {R4-R11} // 那么,我们需要将除异常自动保存的寄存器这外的其它寄存器自动保存起来{R4, R11}
// 保存的地址是当前任务的PSP堆栈中,这样就完整的保存了必要的CPU寄存器,便于下次恢复
LDR R1, =currentTask // 保存好后,将最后的堆栈顶位置,保存到currentTask->stack处
LDR R1, [R1] // 由于stack处在结构体stack处的开始位置处,显然currentTask和stack在内存中的起始
STR R0, [R1] // 地址是一样的,这么做不会有任何问题
PendSVHandler_nosave // 无论是tTaskSwitch和tTaskSwitch触发的,最后都要从下一个要运行的任务的堆栈中恢复
// CPU寄存器,然后切换至该任务中运行
LDR R0, =currentTask // 好了,准备切换了
LDR R1, =nextTask
LDR R2, [R1]
STR R2, [R0] // 先将currentTask设置为nextTask,也就是下一任务变成了当前任务
LDR R0, [R2] // 然后,从currentTask中加载stack,这样好知道从哪个位置取出CPU寄存器恢复运行
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出PendSV时,硬件自动恢复
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP
ORR LR, LR, #0x04 // 标记下返回标记,指明在退出LR时,切换到PSP堆栈中(PendSV使用的是MSP)
BX LR // 最后返回,此时任务就会从堆栈中取出LR值,恢复到上次运行的位置
} 其逻辑如下:
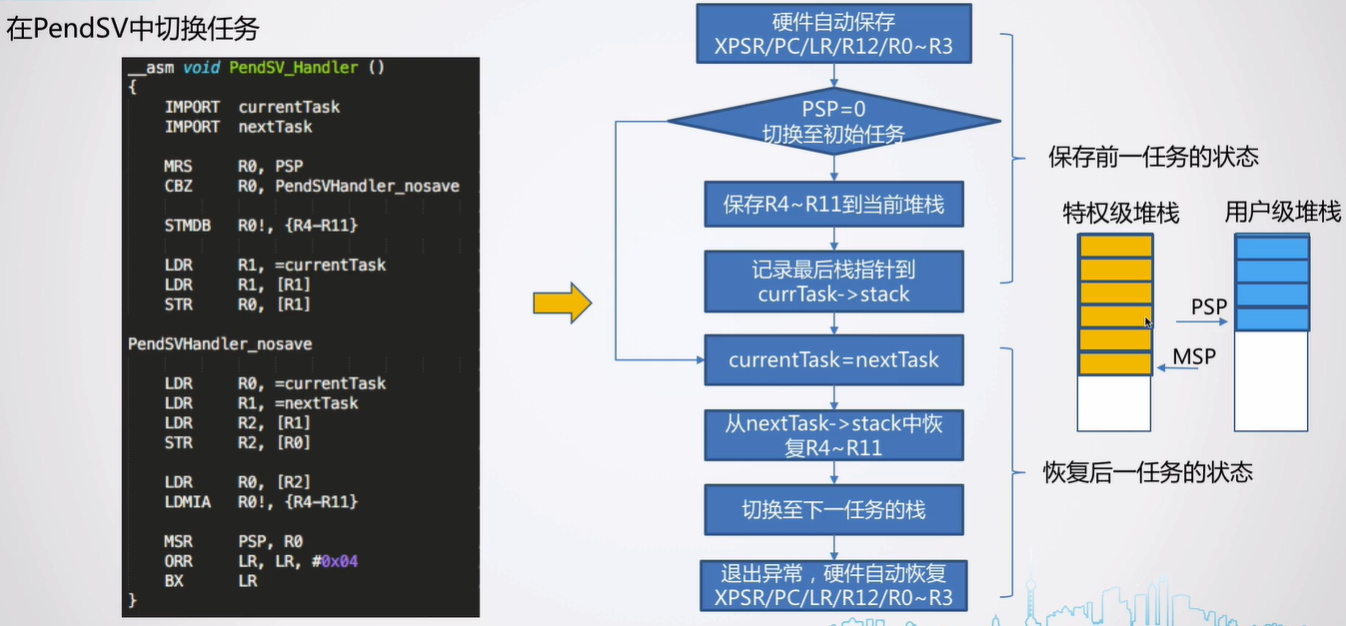
这段代码是保存和切换堆栈的核心,我们先看一下第一段:
在阅读下面这段汇编的时候,我们先有一个顺序捋清:
blockPtr 的值 = block 的地址
block 的值 = stackBuffer[1024] 的地址
PendSVHandler_nosave // 无论是tTaskSwitch和tTaskSwitch触发的,最后都要从下一个要运行的任务的堆栈中恢复
// CPU寄存器,然后切换至该任务中运行
LDR R0, =currentTask // 好了,准备切换了
LDR R1, =nextTask
LDR R2, [R1]
STR R2, [R0] // 先将currentTask设置为nextTask,也就是下一任务变成了当前任务
LDR R0, [R2] // 然后,从currentTask中加载stack,这样好知道从哪个位置取出CPU寄存器恢复运行
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出PendSV时,硬件自动恢复
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP
ORR LR, LR, #0x04 // 标记下返回标记,指明在退出LR时,切换到PSP堆栈中(PendSV使用的是MSP)
BX LR // 最后返回,此时任务就会从堆栈中取出LR值,恢复到上次运行的位置前几行是将当前任务 (currentTask) 赋值给 (nextTask) 任务,使得当前任务就是下一个任务。
然后先出栈到 R4-R11 寄存器。
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出之后直接将 R0 赋值 PSP 堆栈指针,这样在退出 pendSV 中断时即可自动恢复其他的寄存器。
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP 如果不是首次调度任务,仅需要将 R4-R11 寄存器压入即可。其他寄存器在进入 pendSV 中断之前就自动压入到 PSP 寄存器了。
MRS R0, PSP // 获取当前任务的堆栈指针
CBZ R0, PendSVHandler_nosave // if 这是由tTaskSwitch触发的(此时,PSP肯定不会是0了,0的话必定是tTaskRunFirst)触发
// 不清楚的话,可以先看tTaskRunFirst和tTaskSwitch的实现
STMDB R0!, {R4-R11} // 那么,我们需要将除异常自动保存的寄存器这外的其它寄存器自动保存起来{R4, R11}
// 保存的地址是当前任务的PSP堆栈中,这样就完整的保存了必要的CPU寄存器,便于下次恢复
LDR R1, =currentTask // 保存好后,将最后的堆栈顶位置,保存到currentTask->stack处
LDR R1, [R1] // 由于stack处在结构体stack处的开始位置处,显然currentTask和stack在内存中的起始
STR R0, [R1] // 地址是一样的,这么做不会有任何问题1.4.3 声明两个任务
首先定义两个任务的堆栈空间,声明数组:
tTaskStack task1Env[1024];
tTaskStack task2Env[1024];然后创建两个任务,并且使用初始化函数初始化,其中每个任务后执行伪调度函数 tTaskSched();
int task1Flag;
void task1Entry (void * param)
{
for (;;)
{
task1Flag = 1;
delay(100);
task1Flag = 0;
delay(100);
tTaskSched();
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
task2Flag = 1;
delay(100);
task2Flag = 0;
delay(100);
tTaskSched();
}
}
// 初始化任务1和任务2结构,传递运行的起始地址,想要给任意参数,以及运行堆栈空间
tTaskInit(&tTask1, task1Entry, (void *)0x11111111, &task1Env[1024]);
tTaskInit(&tTask2, task2Entry, (void *)0x22222222, &task2Env[1024]);1.4.4 伪调度代码
这就是我们调度任务的函数了,其实很简单,只是切换了一下顺序。
void tTaskSched ()
{
// 这里的算法很简单。
// 一共有两个任务。选择另一个任务,然后切换过去
if (currentTask == taskTable[0])
{
nextTask = taskTable[1];
}
else
{
nextTask = taskTable[0];
}
tTaskSwitch();
}1.4.4 全部代码
/*************************************** Copyright (c)******************************************************
** File name : main.c
** Latest modified Date : 2016-06-01
** Latest Version : 0.1
** Descriptions : 主文件,包含应用代码
**
**--------------------------------------------------------------------------------------------------------
** Created by : 01课堂 lishutong
** Created date : 2016-06-01
** Version : 1.0
** Descriptions : The original version
**
**--------------------------------------------------------------------------------------------------------
** Copyright : 版权所有,禁止用于商业用途
** Author Blog : http://ilishutong.com
**********************************************************************************************************/
#include "tinyOS.h"
#include "ARMCM3.h"
// Cortex-M的堆栈单元类型:堆栈单元的大小为32位,所以使用uint32_t
typedef uint32_t tTaskStack;
// 任务结构:包含了一个任务的所有信息
typedef struct _tTask {
// 任务所用堆栈的当前堆栈指针。每个任务都有他自己的堆栈,用于在运行过程中存储临时变量等一些环境参数
// 在tinyOS运行该任务前,会从stack指向的位置处,会读取堆栈中的环境参数恢复到CPU寄存器中,然后开始运行
// 在切换至其它任务时,会将当前CPU寄存器值保存到堆栈中,等待下一次运行该任务时再恢复。
// stack保存了最后保存环境参数的地址位置,用于后续恢复
tTaskStack * stack;
}tTask;
// 在任务切换中,主要依赖了PendSV进行切换。PendSV其中的一个很重要的作用便是用于支持RTOS的任务切换。
// 实现方法为:
// 1、首先将PendSV的中断优先配置为最低。这样只有在其它所有中断完成后,才会触发该中断;
// 实现方法为:向NVIC_SYSPRI2写NVIC_PENDSV_PRI
// 2、在需要中断切换时,设置挂起位为1,手动触发。这样,当没有其它中断发生时,将会引发PendSV中断。
// 实现方法为:向NVIC_INT_CTRL写NVIC_PENDSVSET
// 3、在PendSV中,执行任务切换操作。
#define NVIC_INT_CTRL 0xE000ED04 // 中断控制及状态寄存器
#define NVIC_PENDSVSET 0x10000000 // 触发软件中断的值
#define NVIC_SYSPRI2 0xE000ED22 // 系统优先级寄存器
#define NVIC_PENDSV_PRI 0x000000FF // 配置优先级
#define MEM32(addr) *(volatile unsigned long *)(addr)
#define MEM8(addr) *(volatile unsigned char *)(addr)
// 当前任务:记录当前是哪个任务正在运行
tTask * currentTask;
// 下一个将即运行的任务:在进行任务切换前,先设置好该值,然后任务切换过程中会从中读取下一任务信息
tTask * nextTask;
// 所有任务的指针数组:简单起见,只使用两个任务
tTask * taskTable[2];
/**********************************************************************************************************
** Function name : tTaskInit
** Descriptions : 初始化任务结构
** parameters : task 要初始化的任务结构
** parameters : entry 任务的入口函数
** parameters : param 传递给任务的运行参数
** Returned value : 无
***********************************************************************************************************/
void tTaskInit (tTask * task, void (*entry)(void *), void *param, uint32_t * stack)
{
// 为了简化代码,tinyOS无论是在启动时切换至第一个任务,还是在运行过程中在不同间任务切换
// 所执行的操作都是先保存当前任务的运行环境参数(CPU寄存器值)的堆栈中(如果已经运行运行起来的话),然后再
// 取出从下一个任务的堆栈中取出之前的运行环境参数,然后恢复到CPU寄存器
// 对于切换至之前从没有运行过的任务,我们为它配置一个“虚假的”保存现场,然后使用该现场恢复。
// 注意以下两点:
// 1、不需要用到的寄存器,直接填了寄存器号,方便在IDE调试时查看效果;
// 2、顺序不能变,要结合PendSV_Handler以及CPU对异常的处理流程来理解
*(--stack) = (unsigned long)(1<<24); // XPSR, 设置了Thumb模式,恢复到Thumb状态而非ARM状态运行
*(--stack) = (unsigned long)entry; // 程序的入口地址
*(--stack) = (unsigned long)0x14; // R14(LR), 任务不会通过return xxx结束自己,所以未用
*(--stack) = (unsigned long)0x12; // R12, 未用
*(--stack) = (unsigned long)0x3; // R3, 未用
*(--stack) = (unsigned long)0x2; // R2, 未用
*(--stack) = (unsigned long)0x1; // R1, 未用
*(--stack) = (unsigned long)param; // R0 = param, 传给任务的入口函数
*(--stack) = (unsigned long)0x11; // R11, 未用
*(--stack) = (unsigned long)0x10; // R10, 未用
*(--stack) = (unsigned long)0x9; // R9, 未用
*(--stack) = (unsigned long)0x8; // R8, 未用
*(--stack) = (unsigned long)0x7; // R7, 未用
*(--stack) = (unsigned long)0x6; // R6, 未用
*(--stack) = (unsigned long)0x5; // R5, 未用
*(--stack) = (unsigned long)0x4; // R4, 未用
task->stack = stack; // 保存最终的值
}
/**********************************************************************************************************
** Function name : tTaskSched
** Descriptions : 任务调度接口。tinyOS通过它来选择下一个具体的任务,然后切换至该任务运行。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSched ()
{
// 这里的算法很简单。
// 一共有两个任务。选择另一个任务,然后切换过去
if (currentTask == taskTable[0])
{
nextTask = taskTable[1];
}
else
{
nextTask = taskTable[0];
}
tTaskSwitch();
}
/**********************************************************************************************************
** 应用示例
** 有两个任务,分别执行task1Entry和task2Entry。功能是分别对相应的变量进行周期性置0置1,每次完成从1->0的切换后,
** 自动切换至另一个任务中运行。这样便实现了两个任务交替性的使用一段时间CPU,对相应变量值修改。
**********************************************************************************************************/
void delay (int count)
{
while (--count > 0);
}
int task1Flag;
void task1Entry (void * param)
{
for (;;)
{
task1Flag = 1;
delay(100);
task1Flag = 0;
delay(100);
tTaskSched();
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
task2Flag = 1;
delay(100);
task2Flag = 0;
delay(100);
tTaskSched();
}
}
// 下面的代码中,用到了C文件嵌入ARM汇编
// 基本语法为:__asm 返回值 函数名(参数声明) {....}, 更具体的用法见Keil编译器手册,此处不再详注。
/**********************************************************************************************************
** Function name : PendSV_Handler
** Descriptions : PendSV异常处理函数。很有些会奇怪,看不到这个函数有在哪里调用。实际上,只要保持函数头不变
** void PendSV_Handler (), 在PendSV发生时,该函数会被自动调用
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
__asm void PendSV_Handler ()
{
IMPORT currentTask // 使用import导入C文件中声明的全局变量
IMPORT nextTask // 类似于在C文文件中使用extern int variable
MRS R0, PSP // 获取当前任务的堆栈指针
CBZ R0, PendSVHandler_nosave // if 这是由tTaskSwitch触发的(此时,PSP肯定不会是0了,0的话必定是tTaskRunFirst)触发
// 不清楚的话,可以先看tTaskRunFirst和tTaskSwitch的实现
STMDB R0!, {R4-R11} // 那么,我们需要将除异常自动保存的寄存器这外的其它寄存器自动保存起来{R4, R11}
// 保存的地址是当前任务的PSP堆栈中,这样就完整的保存了必要的CPU寄存器,便于下次恢复
LDR R1, =currentTask // 保存好后,将最后的堆栈顶位置,保存到currentTask->stack处
LDR R1, [R1] // 由于stack处在结构体stack处的开始位置处,显然currentTask和stack在内存中的起始
STR R0, [R1] // 地址是一样的,这么做不会有任何问题
PendSVHandler_nosave // 无论是tTaskSwitch和tTaskSwitch触发的,最后都要从下一个要运行的任务的堆栈中恢复
// CPU寄存器,然后切换至该任务中运行
LDR R0, =currentTask // 好了,准备切换了
LDR R1, =nextTask
LDR R2, [R1]
STR R2, [R0] // 先将currentTask设置为nextTask,也就是下一任务变成了当前任务
LDR R0, [R2] // 然后,从currentTask中加载stack,这样好知道从哪个位置取出CPU寄存器恢复运行
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出PendSV时,硬件自动恢复
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP
ORR LR, LR, #0x04 // 标记下返回标记,指明在退出LR时,切换到PSP堆栈中(PendSV使用的是MSP)
BX LR // 最后返回,此时任务就会从堆栈中取出LR值,恢复到上次运行的位置
}
/**********************************************************************************************************
** Function name : tTaskRunFirst
** Descriptions : 在启动tinyOS时,调用该函数,将切换至第一个任务运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskRunFirst()
{
// 这里设置了一个标记,PSP = 0, 用于与tTaskSwitch()区分,用于在PEND_SV
// 中判断当前切换是tinyOS启动时切换至第1个任务,还是多任务已经跑起来后执行的切换
__set_PSP(0);
MEM8(NVIC_SYSPRI2) = NVIC_PENDSV_PRI; // 向NVIC_SYSPRI2写NVIC_PENDSV_PRI,设置其为最低优先级
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
// 可以看到,这个函数是没有返回
// 这是因为,一旦触发PendSV后,将会在PendSV后立即进行任务切换,切换至第1个任务运行
// 此后,tinyOS将负责管理所有任务的运行,永远不会返回到该函数运行
}
/**********************************************************************************************************
** Function name : tTaskSwitch
** Descriptions : 进行一次任务切换,tinyOS会预先配置好currentTask和nextTask, 然后调用该函数,切换至
** nextTask运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSwitch()
{
// 和tTaskRunFirst, 这个函数会在某个任务中调用,然后触发PendSV切换至其它任务
// 之后的某个时候,将会再次切换到该任务运行,此时,开始运行该行代码, 返回到
// tTaskSwitch调用处继续往下运行
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
}
// 任务1和任务2的任务结构,以及用于堆栈空间
tTask tTask1;
tTask tTask2;
tTaskStack task1Env[1024];
tTaskStack task2Env[1024];
int main ()
{
// 初始化任务1和任务2结构,传递运行的起始地址,想要给任意参数,以及运行堆栈空间
tTaskInit(&tTask1, task1Entry, (void *)0x11111111, &task1Env[1024]);
tTaskInit(&tTask2, task2Entry, (void *)0x22222222, &task2Env[1024]);
// 接着,将任务加入到任务表中
taskTable[0] = &tTask1;
taskTable[1] = &tTask2;
// 我们期望先运行tTask1, 也就是void task1Entry (void * param)
nextTask = taskTable[0];
// 切换到nextTask, 这个函数永远不会返回
tTaskRunFirst();
return 0;
}
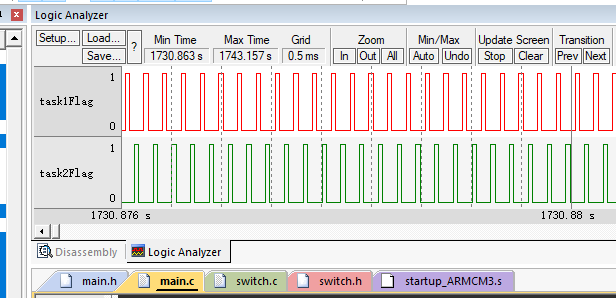
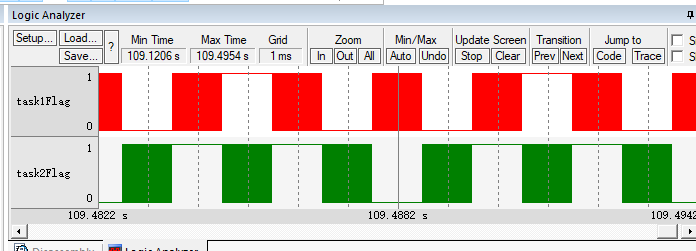
1.5 运行效果
tTaskSwitch() 函数触发 PendSV 中断,之后就成功调度这两个任务啦,我们可见当一个任务执行完成后便切换到下一个任务循环执行,task1Flag 执行完毕后就立刻执行 task2Flag,两个任务循环切换。
二、滴答定时器切换任务 (时间片轮转)
2.1 时间片轮转
时间片就是 RTOS 给每个任务分配的 MCU 使用时间长度。
在 RTOS 如果有多个同优先级任务处于就绪状态,RTOS 会采用时间片轮转调度。RTOS 本身回味每一个任务分配一个固定的 CPU 使用时长,当任务使用的时长到期后,调度器就会切换下一个同优先级任务。
假设 RTOS 有两个同优先级任务 TankA 和 TankB。时间片设置为 10ms,则 CPU 执行情况如下:
时间线 →
|<--10ms--> |<--10ms--> |<--10ms--> | ...
TaskA TaskB TaskA
两个任务在间隔 10ms 的时间片轮转切换。
2.2 滴答定时器是什么
滴答定时器原理可以看我之前的文章:
STM32 寄存器操作 systick 滴答定时器 与中断_stm32滴答中断-优快云博客
2.3 使用滴答定时器切换任务
2.3.1 滴答定时器代码演示
在嵌入式系统中我们常用滴答定时器作为时间片切换的时钟,我们不再给每个任务结尾插入切换任务的函数 tTaskSched(),而是使用滴答定时器定时切换任务。
/*********************************************************************************************************
** 系统时钟节拍定时器System Tick配置
** 在我们目前的环境(模拟器)中,系统时钟节拍为12MHz
** 请务必按照本教程推荐配置,否则systemTick的值就会有变化,需要查看数据手册才了解
**********************************************************************************************************/
void tSetSysTickPeriod(uint32_t ms)
{
SysTick->LOAD = ms * SystemCoreClock / 1000 - 1;
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
}
/**********************************************************************************************************
** Function name : SysTick_Handler
** Descriptions : SystemTick的中断处理函数。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void SysTick_Handler ()
{
// 什么都没做,除了进行任务切换
// 由于tTaskSched自动选择另一个任务切换过去,所以其效果就是
// 两个任务交替运行,与上一次例子不同的是,这是由系统时钟节拍推动的
// 如果说,上一个例子里需要每个任务主动去调用tTaskSched切换,那么这里就是不管任务愿不愿意,CPU
// 的运行权都会被交给另一个任务。这样对每个任务就很公平了,不存在某个任务拒不调用tTaskSched而一直占用CPU的情况
tTaskSched();
}2.3.2 全部代码
#include "ARMCM3.h"
#include <stdint.h>
// 标准头文件,里面包含了常用的类型定义,如uint32_t
void tTaskSwitch();
// Cortex-M的堆栈单元类型:堆栈单元的大小为32位,所以使用uint32_t
typedef uint32_t tTaskStack;
// 任务结构:包含了一个任务的所有信息
typedef struct _tTask {
// 任务所用堆栈的当前堆栈指针。每个任务都有他自己的堆栈,用于在运行过程中存储临时变量等一些环境参数
// 在tinyOS运行该任务前,会从stack指向的位置处,会读取堆栈中的环境参数恢复到CPU寄存器中,然后开始运行
// 在切换至其它任务时,会将当前CPU寄存器值保存到堆栈中,等待下一次运行该任务时再恢复。
// stack保存了最后保存环境参数的地址位置,用于后续恢复
tTaskStack * stack;
}tTask;
// 当前任务:记录当前是哪个任务正在运行
tTask * currentTask;
// 下一个将即运行的任务:在进行任务切换前,先设置好该值,然后任务切换过程中会从中读取下一任务信息
tTask * nextTask;
// 所有任务的指针数组:简单起见,只使用两个任务
tTask * taskTable[2];
// 任务1和任务2的任务结构,以及用于堆栈空间
tTask tTask1;
tTask tTask2;
tTaskStack task1Env[1024];
tTaskStack task2Env[1024];
// 在任务切换中,主要依赖了PendSV进行切换。PendSV其中的一个很重要的作用便是用于支持RTOS的任务切换。
// 实现方法为:
// 1、首先将PendSV的中断优先配置为最低。这样只有在其它所有中断完成后,才会触发该中断;
// 实现方法为:向NVIC_SYSPRI2写NVIC_PENDSV_PRI
// 2、在需要中断切换时,设置挂起位为1,手动触发。这样,当没有其它中断发生时,将会引发PendSV中断。
// 实现方法为:向NVIC_INT_CTRL写NVIC_PENDSVSET
// 3、在PendSV中,执行任务切换操作。
#define NVIC_INT_CTRL 0xE000ED04 // 中断控制及状态寄存器
#define NVIC_PENDSVSET 0x10000000 // 触发软件中断的值
#define NVIC_SYSPRI2 0xE000ED22 // 系统优先级寄存器
#define NVIC_PENDSV_PRI 0x000000FF // 配置优先级
#define MEM32(addr) *(volatile unsigned long *)(addr)
#define MEM8(addr) *(volatile unsigned char *)(addr)
// 在任务切换中,主要依赖了PendSV进行切换。PendSV其中的一个很重要的作用便是用于支持RTOS的任务切换。
// 实现方法为:
// 1、首先将PendSV的中断优先配置为最低。这样只有在其它所有中断完成后,才会触发该中断;
// 实现方法为:向NVIC_SYSPRI2写NVIC_PENDSV_PRI
// 2、在需要中断切换时,设置挂起位为1,手动触发。这样,当没有其它中断发生时,将会引发PendSV中断。
// 实现方法为:向NVIC_INT_CTRL写NVIC_PENDSVSET
// 3、在PendSV中,执行任务切换操作。
#define NVIC_INT_CTRL 0xE000ED04 // 中断控制及状态寄存器
#define NVIC_PENDSVSET 0x10000000 // 触发软件中断的值
#define NVIC_SYSPRI2 0xE000ED22 // 系统优先级寄存器
#define NVIC_PENDSV_PRI 0x000000FF // 配置优先级
#define MEM32(addr) *(volatile unsigned long *)(addr)
#define MEM8(addr) *(volatile unsigned char *)(addr)
/**********************************************************************************************************
** Function name : tTaskInit
** Descriptions : 初始化任务结构
** parameters : task 要初始化的任务结构
** parameters : entry 任务的入口函数
** parameters : param 传递给任务的运行参数
** Returned value : 无
***********************************************************************************************************/
void tTaskInit (tTask * task, void (*entry)(void *), void *param, uint32_t * stack)
{
// 为了简化代码,tinyOS无论是在启动时切换至第一个任务,还是在运行过程中在不同间任务切换
// 所执行的操作都是先保存当前任务的运行环境参数(CPU寄存器值)的堆栈中(如果已经运行运行起来的话),然后再
// 取出从下一个任务的堆栈中取出之前的运行环境参数,然后恢复到CPU寄存器
// 对于切换至之前从没有运行过的任务,我们为它配置一个“虚假的”保存现场,然后使用该现场恢复。
// 注意以下两点:
// 1、不需要用到的寄存器,直接填了寄存器号,方便在IDE调试时查看效果;
// 2、顺序不能变,要结合PendSV_Handler以及CPU对异常的处理流程来理解
*(--stack) = (unsigned long)(1<<24); // XPSR, 设置了Thumb模式,恢复到Thumb状态而非ARM状态运行
*(--stack) = (unsigned long)entry; // 程序的入口地址
*(--stack) = (unsigned long)0x14; // R14(LR), 任务不会通过return xxx结束自己,所以未用
*(--stack) = (unsigned long)0x12; // R12, 未用
*(--stack) = (unsigned long)0x3; // R3, 未用
*(--stack) = (unsigned long)0x2; // R2, 未用
*(--stack) = (unsigned long)0x1; // R1, 未用
*(--stack) = (unsigned long)param; // R0 = param, 传给任务的入口函数
*(--stack) = (unsigned long)0x11; // R11, 未用
*(--stack) = (unsigned long)0x10; // R10, 未用
*(--stack) = (unsigned long)0x9; // R9, 未用
*(--stack) = (unsigned long)0x8; // R8, 未用
*(--stack) = (unsigned long)0x7; // R7, 未用
*(--stack) = (unsigned long)0x6; // R6, 未用
*(--stack) = (unsigned long)0x5; // R5, 未用
*(--stack) = (unsigned long)0x4; // R4, 未用
task->stack = stack; // 保存最终的值
}
/**********************************************************************************************************
** Function name : tTaskSched
** Descriptions : 任务调度接口。tinyOS通过它来选择下一个具体的任务,然后切换至该任务运行。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSched ()
{
// 这里的算法很简单。
// 一共有两个任务。选择另一个任务,然后切换过去
if (currentTask == taskTable[0])
{
nextTask = taskTable[1];
}
else
{
nextTask = taskTable[0];
}
tTaskSwitch();
}
/*********************************************************************************************************
** 系统时钟节拍定时器System Tick配置
** 在我们目前的环境(模拟器)中,系统时钟节拍为12MHz
** 请务必按照本教程推荐配置,否则systemTick的值就会有变化,需要查看数据手册才了解
**********************************************************************************************************/
void tSetSysTickPeriod(uint32_t ms)
{
SysTick->LOAD = ms * SystemCoreClock / 1000 - 1;
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
}
/**********************************************************************************************************
** Function name : SysTick_Handler
** Descriptions : SystemTick的中断处理函数。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void SysTick_Handler ()
{
// 什么都没做,除了进行任务切换
// 由于tTaskSched自动选择另一个任务切换过去,所以其效果就是
// 两个任务交替运行,与上一次例子不同的是,这是由系统时钟节拍推动的
// 如果说,上一个例子里需要每个任务主动去调用tTaskSched切换,那么这里就是不管任务愿不愿意,CPU
// 的运行权都会被交给另一个任务。这样对每个任务就很公平了,不存在某个任务拒不调用tTaskSched而一直占用CPU的情况
tTaskSched();
}
/**********************************************************************************************************
** 应用示例
** 有两个任务,分别执行task1Entry和task2Entry。功能是分别对相应的变量进行周期性置0置1.
** 每个任务都可以占用一段时间的CPU,一旦用完了,就会被强制暂停,切换到另一个任务中去。
**********************************************************************************************************/
void delay (int count)
{
while (--count > 0);
}
int task1Flag;
void task1Entry (void * param)
{
tSetSysTickPeriod(10);
for (;;)
{
task1Flag = 1;
delay(100);
task1Flag = 0;
delay(100);
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
task2Flag = 1;
delay(100);
task2Flag = 0;
delay(100);
}
}
// 下面的代码中,用到了C文件嵌入ARM汇编
// 基本语法为:__asm 返回值 函数名(参数声明) {....}, 更具体的用法见Keil编译器手册,此处不再详注。
/**********************************************************************************************************
** Function name : PendSV_Handler
** Descriptions : PendSV异常处理函数。很有些会奇怪,看不到这个函数有在哪里调用。实际上,只要保持函数头不变
** void PendSV_Handler (), 在PendSV发生时,该函数会被自动调用
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
__asm void PendSV_Handler ()
{
IMPORT currentTask // 使用import导入C文件中声明的全局变量
IMPORT nextTask // 类似于在C文文件中使用extern int variable
MRS R0, PSP // 获取当前任务的堆栈指针
CBZ R0, PendSVHandler_nosave // if 这是由tTaskSwitch触发的(此时,PSP肯定不会是0了,0的话必定是tTaskRunFirst)触发
// 不清楚的话,可以先看tTaskRunFirst和tTaskSwitch的实现
STMDB R0!, {R4-R11} // 那么,我们需要将除异常自动保存的寄存器这外的其它寄存器自动保存起来{R4, R11}
// 保存的地址是当前任务的PSP堆栈中,这样就完整的保存了必要的CPU寄存器,便于下次恢复
LDR R1, =currentTask // 保存好后,将最后的堆栈顶位置,保存到currentTask->stack处
LDR R1, [R1] // 由于stack处在结构体stack处的开始位置处,显然currentTask和stack在内存中的起始
STR R0, [R1] // 地址是一样的,这么做不会有任何问题
PendSVHandler_nosave // 无论是tTaskSwitch和tTaskSwitch触发的,最后都要从下一个要运行的任务的堆栈中恢复
// CPU寄存器,然后切换至该任务中运行
LDR R0, =currentTask // 好了,准备切换了
LDR R1, =nextTask
LDR R2, [R1]
STR R2, [R0] // 先将currentTask设置为nextTask,也就是下一任务变成了当前任务
LDR R0, [R2] // 然后,从currentTask中加载stack,这样好知道从哪个位置取出CPU寄存器恢复运行
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出PendSV时,硬件自动恢复
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP
ORR LR, LR, #0x04 // 标记下返回标记,指明在退出LR时,切换到PSP堆栈中(PendSV使用的是MSP)
BX LR // 最后返回,此时任务就会从堆栈中取出LR值,恢复到上次运行的位置
}
/**********************************************************************************************************
** Function name : tTaskRunFirst
** Descriptions : 在启动tinyOS时,调用该函数,将切换至第一个任务运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskRunFirst()
{
// 这里设置了一个标记,PSP = 0, 用于与tTaskSwitch()区分,用于在PEND_SV
// 中判断当前切换是tinyOS启动时切换至第1个任务,还是多任务已经跑起来后执行的切换
__set_PSP(0);
MEM8(NVIC_SYSPRI2) = NVIC_PENDSV_PRI; // 向NVIC_SYSPRI2写NVIC_PENDSV_PRI,设置其为最低优先级
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
// 可以看到,这个函数是没有返回
// 这是因为,一旦触发PendSV后,将会在PendSV后立即进行任务切换,切换至第1个任务运行
// 此后,tinyOS将负责管理所有任务的运行,永远不会返回到该函数运行
}
/**********************************************************************************************************
** Function name : tTaskSwitch
** Descriptions : 进行一次任务切换,tinyOS会预先配置好currentTask和nextTask, 然后调用该函数,切换至
** nextTask运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSwitch()
{
// 和tTaskRunFirst, 这个函数会在某个任务中调用,然后触发PendSV切换至其它任务
// 之后的某个时候,将会再次切换到该任务运行,此时,开始运行该行代码, 返回到
// tTaskSwitch调用处继续往下运行
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
}
int main ()
{
// 初始化任务1和任务2结构,传递运行的起始地址,想要给任意参数,以及运行堆栈空间
tTaskInit(&tTask1, task1Entry, (void *)0x11111111, &task1Env[1024]);
tTaskInit(&tTask2, task2Entry, (void *)0x22222222, &task2Env[1024]);
// 接着,将任务加入到任务表中
taskTable[0] = &tTask1;
taskTable[1] = &tTask2;
// 我们期望先运行tTask1, 也就是void task1Entry (void * param)
nextTask = taskTable[0];
// 切换到nextTask, 这个函数永远不会返回
tTaskRunFirst();
return 0;
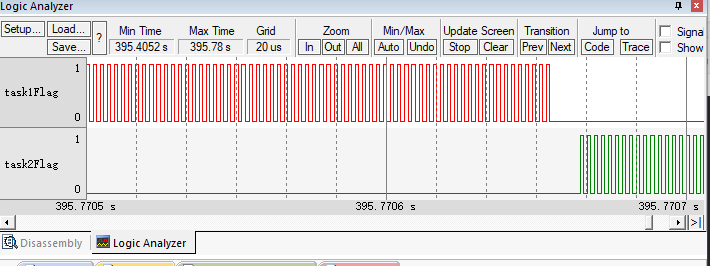
}2.4 运行效果
实现效果如下,每次滴答定时器切换即调度一次任务。
放大来看,任务正在持续运行而且调度中。
三、空闲任务
3.1 空闲任务是什么
在 RTOS 里,空闲任务就是最后一个备用任务。当系统没有任何其他任务处于就绪态 (Ready) 时,调度器就让空闲任务运行。
在 FreeRTOS 和大多数成熟的 RTOS 系统中,空闲任务是由内核自动创建的,优先级是最低的。
通常空闲任务会回收被删除任务的堆栈,比如 FreeRTOS 会在此刻回收被 vTaskDelete() 删除的任务堆栈空间。
也可以执行用户的钩子函数,统计 CPU 占用率,进入低功耗模式等。
3.2 编码实现
3.2.1 空闲任务定义
空闲任务我们暂时定义为什么也不做
void idleTaskEntry (void * param) {
for (;;)
{
// 空闲任务什么都不做
}
}3.2.2 延迟函数
void tTaskDelay (uint32_t delay) {
// 配置好当前要延时的ticks数
currentTask->delayTicks = delay;
// 然后进行任务切换,切换至另一个任务,或者空闲任务
// delayTikcs会在时钟中断中自动减1.当减至0时,会切换回来继续运行。
tTaskSched();
}2.3.3 修改任务定义
任务内的延时修改成 RTOS 延迟函数 tTaskDelay()。
int task1Flag;
void task1Entry (void * param)
{
tSetSysTickPeriod(10);
for (;;)
{
task1Flag = 1;
tTaskDelay(1);
task1Flag = 0;
tTaskDelay(1);
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
task2Flag = 1;
tTaskDelay(1);
task2Flag = 0;
tTaskDelay(1);
}
}3.2.4 调度任务函数修改
/**********************************************************************************************************
** Function name : tTaskSched
** Descriptions : 任务调度接口。tinyOS通过它来选择下一个具体的任务,然后切换至该任务运行。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSched ()
{
// 空闲任务只有在所有其它任务都不是延时状态时才执行
// 所以,我们先检查下当前任务是否是空闲任务
if (currentTask == idleTask)
{
// 如果是的话,那么去执行task1或者task2中的任意一个
// 当然,如果某个任务还在延时状态,那么就不应该切换到他。
// 如果所有任务都在延时,那么就继续运行空闲任务,不进行任何切换了
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
} else
{
return;
}
}
else
{
// 如果是task1或者task2的话,检查下另外一个任务
// 如果另外的任务不在延时中,就切换到该任务
// 否则,判断下当前任务是否应该进入延时状态,如果是的话,就切换到空闲任务。否则就不进行任何切换
if (currentTask == taskTable[0])
{
if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
return;
}
}
else if (currentTask == taskTable[1])
{
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
return;
}
}
}
tTaskSwitch();
}3.2.3 全部代码
#include "ARMCM3.h"
#include <stdint.h>
void tTaskSwitch();
// 在任务切换中,主要依赖了PendSV进行切换。PendSV其中的一个很重要的作用便是用于支持RTOS的任务切换。
// 实现方法为:
// 1、首先将PendSV的中断优先配置为最低。这样只有在其它所有中断完成后,才会触发该中断;
// 实现方法为:向NVIC_SYSPRI2写NVIC_PENDSV_PRI
// 2、在需要中断切换时,设置挂起位为1,手动触发。这样,当没有其它中断发生时,将会引发PendSV中断。
// 实现方法为:向NVIC_INT_CTRL写NVIC_PENDSVSET
// 3、在PendSV中,执行任务切换操作。
#define NVIC_INT_CTRL 0xE000ED04 // 中断控制及状态寄存器
#define NVIC_PENDSVSET 0x10000000 // 触发软件中断的值
#define NVIC_SYSPRI2 0xE000ED22 // 系统优先级寄存器
#define NVIC_PENDSV_PRI 0x000000FF // 配置优先级
#define MEM32(addr) *(volatile unsigned long *)(addr)
#define MEM8(addr) *(volatile unsigned char *)(addr)
// Cortex-M的堆栈单元类型:堆栈单元的大小为32位,所以使用uint32_t
typedef uint32_t tTaskStack;
// 任务结构:包含了一个任务的所有信息
typedef struct _tTask {
// 任务所用堆栈的当前堆栈指针。每个任务都有他自己的堆栈,用于在运行过程中存储临时变量等一些环境参数
// 在tinyOS运行该任务前,会从stack指向的位置处,会读取堆栈中的环境参数恢复到CPU寄存器中,然后开始运行
// 在切换至其它任务时,会将当前CPU寄存器值保存到堆栈中,等待下一次运行该任务时再恢复。
// stack保存了最后保存环境参数的地址位置,用于后续恢复
tTaskStack * stack;
// 任务延时计数器
uint32_t delayTicks;
}tTask;
// 当前任务:记录当前是哪个任务正在运行
tTask * currentTask;
// 下一个将即运行的任务:在进行任务切换前,先设置好该值,然后任务切换过程中会从中读取下一任务信息
tTask * nextTask;
// 空闲任务
tTask * idleTask;
// 所有任务的指针数组:简单起见,只使用两个任务
tTask * taskTable[2];
/**********************************************************************************************************
** Function name : tTaskInit
** Descriptions : 初始化任务结构
** parameters : task 要初始化的任务结构
** parameters : entry 任务的入口函数
** parameters : param 传递给任务的运行参数
** Returned value : 无
***********************************************************************************************************/
void tTaskInit (tTask * task, void (*entry)(void *), void *param, uint32_t * stack)
{
// 为了简化代码,tinyOS无论是在启动时切换至第一个任务,还是在运行过程中在不同间任务切换
// 所执行的操作都是先保存当前任务的运行环境参数(CPU寄存器值)的堆栈中(如果已经运行运行起来的话),然后再
// 取出从下一个任务的堆栈中取出之前的运行环境参数,然后恢复到CPU寄存器
// 对于切换至之前从没有运行过的任务,我们为它配置一个“虚假的”保存现场,然后使用该现场恢复。
// 注意以下两点:
// 1、不需要用到的寄存器,直接填了寄存器号,方便在IDE调试时查看效果;
// 2、顺序不能变,要结合PendSV_Handler以及CPU对异常的处理流程来理解
*(--stack) = (unsigned long)(1<<24); // XPSR, 设置了Thumb模式,恢复到Thumb状态而非ARM状态运行
*(--stack) = (unsigned long)entry; // 程序的入口地址
*(--stack) = (unsigned long)0x14; // R14(LR), 任务不会通过return xxx结束自己,所以未用
*(--stack) = (unsigned long)0x12; // R12, 未用
*(--stack) = (unsigned long)0x3; // R3, 未用
*(--stack) = (unsigned long)0x2; // R2, 未用
*(--stack) = (unsigned long)0x1; // R1, 未用
*(--stack) = (unsigned long)param; // R0 = param, 传给任务的入口函数
*(--stack) = (unsigned long)0x11; // R11, 未用
*(--stack) = (unsigned long)0x10; // R10, 未用
*(--stack) = (unsigned long)0x9; // R9, 未用
*(--stack) = (unsigned long)0x8; // R8, 未用
*(--stack) = (unsigned long)0x7; // R7, 未用
*(--stack) = (unsigned long)0x6; // R6, 未用
*(--stack) = (unsigned long)0x5; // R5, 未用
*(--stack) = (unsigned long)0x4; // R4, 未用
task->stack = stack; // 保存最终的值
task->delayTicks = 0;
}
/**********************************************************************************************************
** Function name : tTaskSched
** Descriptions : 任务调度接口。tinyOS通过它来选择下一个具体的任务,然后切换至该任务运行。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSched ()
{
// 空闲任务只有在所有其它任务都不是延时状态时才执行
// 所以,我们先检查下当前任务是否是空闲任务
if (currentTask == idleTask)
{
// 如果是的话,那么去执行task1或者task2中的任意一个
// 当然,如果某个任务还在延时状态,那么就不应该切换到他。
// 如果所有任务都在延时,那么就继续运行空闲任务,不进行任何切换了
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
} else
{
return;
}
}
else
{
// 如果是task1或者task2的话,检查下另外一个任务
// 如果另外的任务不在延时中,就切换到该任务
// 否则,判断下当前任务是否应该进入延时状态,如果是的话,就切换到空闲任务。否则就不进行任何切换
if (currentTask == taskTable[0])
{
if (taskTable[1]->delayTicks == 0)
{
nextTask = taskTable[1];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
return;
}
}
else if (currentTask == taskTable[1])
{
if (taskTable[0]->delayTicks == 0)
{
nextTask = taskTable[0];
}
else if (currentTask->delayTicks != 0)
{
nextTask = idleTask;
}
else
{
return;
}
}
}
tTaskSwitch();
}
/**********************************************************************************************************
** Function name : tTaskSystemTickHandler
** Descriptions : 系统时钟节拍处理。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSystemTickHandler ()
{
// 检查所有任务的delayTicks数,如果不0的话,减1。
int i;
for (i = 0; i < 2; i++)
{
if (taskTable[i]->delayTicks > 0)
{
taskTable[i]->delayTicks--;
}
}
// 这个过程中可能有任务延时完毕(delayTicks = 0),进行一次调度。
tTaskSched();
}
/**********************************************************************************************************
** Function name : tTaskDelay
** Descriptions : 使当前任务进入延时状态。
** parameters : delay 延时多少个ticks
** Returned value : 无
***********************************************************************************************************/
void tTaskDelay (uint32_t delay) {
// 配置好当前要延时的ticks数
currentTask->delayTicks = delay;
// 然后进行任务切换,切换至另一个任务,或者空闲任务
// delayTikcs会在时钟中断中自动减1.当减至0时,会切换回来继续运行。
tTaskSched();
}
/*********************************************************************************************************
** 系统时钟节拍定时器System Tick配置
** 在我们目前的环境(模拟器)中,系统时钟节拍为12MHz
** 请务必按照本教程推荐配置,否则systemTick的值就会有变化,需要查看数据手册才了解
**********************************************************************************************************/
void tSetSysTickPeriod(uint32_t ms)
{
SysTick->LOAD = ms * SystemCoreClock / 1000 - 1;
NVIC_SetPriority (SysTick_IRQn, (1<<__NVIC_PRIO_BITS) - 1);
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk;
}
/**********************************************************************************************************
** Function name : SysTick_Handler
** Descriptions : SystemTick的中断处理函数。
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void SysTick_Handler ()
{
tTaskSystemTickHandler();
}
/**********************************************************************************************************
** 应用示例
** 有两个任务,分别执行task1Entry和task2Entry。功能是分别对相应的变量进行周期性置0置1.
** 每个任务都可以占用一段时间的CPU,一旦用完了,就会被强制暂停,切换到另一个任务中去。
**********************************************************************************************************/
int task1Flag;
void task1Entry (void * param)
{
tSetSysTickPeriod(10);
for (;;)
{
task1Flag = 1;
tTaskDelay(1);
task1Flag = 0;
tTaskDelay(1);
}
}
int task2Flag;
void task2Entry (void * param)
{
for (;;)
{
task2Flag = 1;
tTaskDelay(1);
task2Flag = 0;
tTaskDelay(1);
}
}
// 任务1和任务2的任务结构,以及用于堆栈空间
tTask tTask1;
tTask tTask2;
tTaskStack task1Env[1024];
tTaskStack task2Env[1024];
// 用于空闲任务的任务结构和堆栈空间
tTask tTaskIdle;
tTaskStack idleTaskEnv[1024];
void idleTaskEntry (void * param) {
for (;;)
{
// 空闲任务什么都不做
}
}
// 下面的代码中,用到了C文件嵌入ARM汇编
// 基本语法为:__asm 返回值 函数名(参数声明) {....}, 更具体的用法见Keil编译器手册,此处不再详注。
/**********************************************************************************************************
** Function name : PendSV_Handler
** Descriptions : PendSV异常处理函数。很有些会奇怪,看不到这个函数有在哪里调用。实际上,只要保持函数头不变
** void PendSV_Handler (), 在PendSV发生时,该函数会被自动调用
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
__asm void PendSV_Handler ()
{
IMPORT currentTask // 使用import导入C文件中声明的全局变量
IMPORT nextTask // 类似于在C文文件中使用extern int variable
MRS R0, PSP // 获取当前任务的堆栈指针
CBZ R0, PendSVHandler_nosave // if 这是由tTaskSwitch触发的(此时,PSP肯定不会是0了,0的话必定是tTaskRunFirst)触发
// 不清楚的话,可以先看tTaskRunFirst和tTaskSwitch的实现
STMDB R0!, {R4-R11} // 那么,我们需要将除异常自动保存的寄存器这外的其它寄存器自动保存起来{R4, R11}
// 保存的地址是当前任务的PSP堆栈中,这样就完整的保存了必要的CPU寄存器,便于下次恢复
LDR R1, =currentTask // 保存好后,将最后的堆栈顶位置,保存到currentTask->stack处
LDR R1, [R1] // 由于stack处在结构体stack处的开始位置处,显然currentTask和stack在内存中的起始
STR R0, [R1] // 地址是一样的,这么做不会有任何问题
PendSVHandler_nosave // 无论是tTaskSwitch和tTaskSwitch触发的,最后都要从下一个要运行的任务的堆栈中恢复
// CPU寄存器,然后切换至该任务中运行
LDR R0, =currentTask // 好了,准备切换了
LDR R1, =nextTask
LDR R2, [R1]
STR R2, [R0] // 先将currentTask设置为nextTask,也就是下一任务变成了当前任务
LDR R0, [R2] // 然后,从currentTask中加载stack,这样好知道从哪个位置取出CPU寄存器恢复运行
LDMIA R0!, {R4-R11} // 恢复{R4, R11}。为什么只恢复了这么点,因为其余在退出PendSV时,硬件自动恢复
MSR PSP, R0 // 最后,恢复真正的堆栈指针到PSP
ORR LR, LR, #0x04 // 标记下返回标记,指明在退出LR时,切换到PSP堆栈中(PendSV使用的是MSP)
BX LR // 最后返回,此时任务就会从堆栈中取出LR值,恢复到上次运行的位置
}
/**********************************************************************************************************
** Function name : tTaskRunFirst
** Descriptions : 在启动tinyOS时,调用该函数,将切换至第一个任务运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskRunFirst()
{
// 这里设置了一个标记,PSP = 0, 用于与tTaskSwitch()区分,用于在PEND_SV
// 中判断当前切换是tinyOS启动时切换至第1个任务,还是多任务已经跑起来后执行的切换
__set_PSP(0);
MEM8(NVIC_SYSPRI2) = NVIC_PENDSV_PRI; // 向NVIC_SYSPRI2写NVIC_PENDSV_PRI,设置其为最低优先级
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
// 可以看到,这个函数是没有返回
// 这是因为,一旦触发PendSV后,将会在PendSV后立即进行任务切换,切换至第1个任务运行
// 此后,tinyOS将负责管理所有任务的运行,永远不会返回到该函数运行
}
/**********************************************************************************************************
** Function name : tTaskSwitch
** Descriptions : 进行一次任务切换,tinyOS会预先配置好currentTask和nextTask, 然后调用该函数,切换至
** nextTask运行
** parameters : 无
** Returned value : 无
***********************************************************************************************************/
void tTaskSwitch()
{
// 和tTaskRunFirst, 这个函数会在某个任务中调用,然后触发PendSV切换至其它任务
// 之后的某个时候,将会再次切换到该任务运行,此时,开始运行该行代码, 返回到
// tTaskSwitch调用处继续往下运行
MEM32(NVIC_INT_CTRL) = NVIC_PENDSVSET; // 向NVIC_INT_CTRL写NVIC_PENDSVSET,用于PendSV
}
int main ()
{
// 初始化任务1和任务2结构,传递运行的起始地址,想要给任意参数,以及运行堆栈空间
tTaskInit(&tTask1, task1Entry, (void *)0x11111111, &task1Env[1024]);
tTaskInit(&tTask2, task2Entry, (void *)0x22222222, &task2Env[1024]);
// 接着,将任务加入到任务表中
taskTable[0] = &tTask1;
taskTable[1] = &tTask2;
// 创建空闲任务
tTaskInit(&tTaskIdle, idleTaskEntry, (void *)0, &idleTaskEnv[1024]);
idleTask = &tTaskIdle;
// 我们期望先运行tTask1, 也就是void task1Entry (void * param)
nextTask = taskTable[0];
// 切换到nextTask, 这个函数永远不会返回
tTaskRunFirst();
return 0;
}
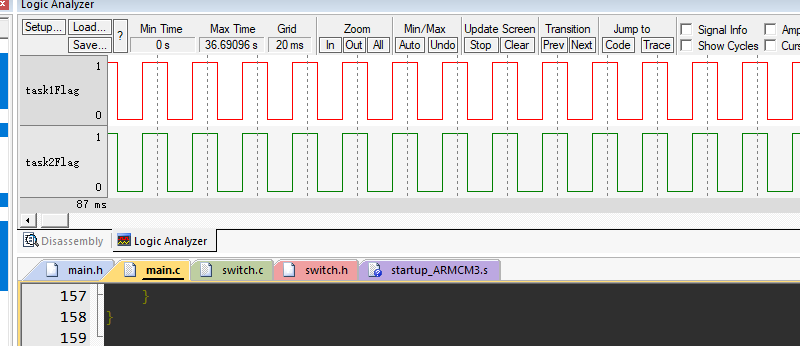
3.3 运行效果
因为我们的任务每切换一次高低电平就进行一次延迟:
void task1Entry (void * param)
{
tSetSysTickPeriod(10);
for (;;)
{
task1Flag = 1;
tTaskDelay(1);
task1Flag = 0;
tTaskDelay(1);
}
}所以实现效果如下:

















 5406
5406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









