



用于汽车地形感知的实验性低太赫兹雷达图像分析
D. Jasteh、E. G. Hoare、M. Cherniakov 和 M. Gashinova
摘要
本文报道了初步的实验结果,为在自动驾驶感知中预期的户外非结构化场景下的低太赫兹(low‐THz)雷达影像技术奠定了基础。简要概述了低太赫兹单成像雷达传感器的需求和规格。讨论了工作在150 GHz的调频连续波(FMCW)雷达的成像能力。实现了150 GHz调频连续波雷达与参考用30吉赫步进频率雷达对道路及非道路场景所获取的实验图像的对比,并对其性能进行了分析。
索引术语
成像雷达,低太赫兹(low‐THz)。
一、引言
在本文中,我们将“低太赫兹”(low‐THz)定义为电磁波谱中0.1至1 THz的频段。工作在低太赫兹频段的系统的性能可与激光雷达和远红外(FIR)光谱进行比较。
十多年以来,低太赫兹成像系统的研究主要集中在隐蔽武器检测上。此类系统的一个例子是[1]中开发的675 GHz远程人员筛查成像雷达。采用CMOS技术制造的太赫兹成像阵列以及具备实时能力的各种太赫兹主动成像系统也已在文献中报道[2],[3]。文献中讨论的其他潜在应用包括化学传感和无损检测[4],医学成像[5],直升机着陆辅助[6],以及室内地图绘制与导航[7]。然而,迄今为止,仅有短程人体扫描仪已进入商业化开发阶段。
本文介绍的雷达系统旨在满足汽车应用中短至中程成像的特殊要求。在这种情况下,前向传感器必须能够在非受限环境中运行,适应任何天气或地形条件,并应对随机目标。这仍然是一个尚未解决的挑战。
已知使用太赫兹频率进行中程传感存在的顾虑是预期的高损耗。然而,在目标低吸收频率窗口(100–700 GHz)内,千米范围上的高衰减和色散通常不超过10 分贝[8],[9]。此外,[10]中的研究表明,即使在浓雾条件下,太赫兹脉冲在100–900 GHz范围内的低吸收窗口中的衰减损耗也小于3 分贝/千米。对于最高达200 米的目标距离范围而言,此类衰减不会构成问题。因此,在雨、雪、尘、烟等恶劣天气条件下,低太赫兹相比远红外尤其是光频具有显著优势[10],[11]。
本论文的目的是展示实验性低太赫兹调频连续波雷达在全地形场景中的成像性能。重点在于通过分析成像环境的特征,并与微波雷达图像进行对比,来解读雷达图像。
本信函内容安排如下。在第二和第三节中,简要讨论了低太赫兹频段用于户外非结构化环境成像的可行性,并概述了系统需求与设计考虑。在第四节中,对工作在约30吉赫微波频率和150 GHz低太赫兹频率的实验系统的成像性能进行了对比,并分析了用于初步图像解释的特征。第五节进一步讨论了成像能力;通过带减速带路面的真实图像展示了识别路面标线的潜力。在第六节中得出了结论,并讨论了进一步系统开发的方向。
II. 低太赫兹频段在汽车应用中的优势
在汽车应用中,使用低太赫兹频段相较于较低频率的微波和毫米波频段,以及光谱另一端的红外和光波段,具有若干潜在优势。低太赫兹感知有望结合光电技术在分辨率方面的合理精细优势与无线电波穿透恶劣环境(如喷雾、雾、尘、雪等)的能力,实现信息丰富的成像。除了传统成像外,雷达还可能提供额外的分类特征,例如阴影深度、后向散射信号中的光谱模式和共振,这些将赋予图像纹理、物体曲率等特性。
以及运动参数估计。低太赫兹图像的增强分辨率使得能够利用大量现有的光学图像处理算法[12]。
为了满足所有通用要求,应在期望的分辨率(距离和方位)、传输带宽、天线尺寸、收发器数量、扫描速率和车辆速度之间进行权衡。
III. 扫描短程成像雷达设计的基本系统要求
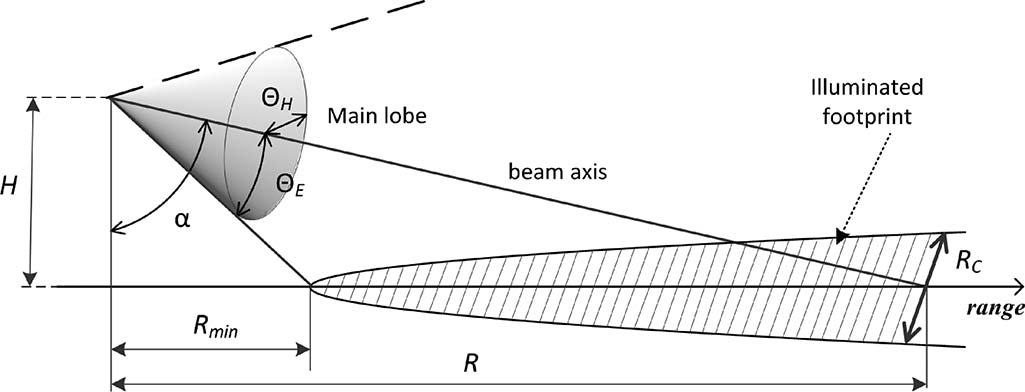
为汽车应用设计扫描式高分辨率成像雷达系统时,应满足的一般要求包括:在方位面上具有窄波束的紧凑型天线,以提供高角度分辨率;能够扫描待成像区域;以及具备宽工作带宽以实现精细距离分辨率。虽然后者是采用上变频频率的低太赫兹器件的固有特性,但天线设计需要付出较大努力才能满足期望的性能[13]。天线应在E面(俯仰)具有较宽的波束 ΘE,以沿路径提供所需宽度的照射区域,同时在H面(方位)具有窄波束 ΘH,以实现良好的角度分辨率。这一点如图1所示。H面(方位)的窄波束导致方位向的孔径尺寸相对较大 d,并会根据夫琅禾费估算增加远场距离(2d²/λ)。因此,体积相对较小的微波透镜喇叭天线是最优解决方案,使得利用紧凑型收发器在短距离下实现成像成为可能[13]。
IV. 基于30 GHz和150 GHz雷达的道路场景成像
为了提供低太赫兹成像的基础和技术支持,并开发算法和处理软件,已在150 GHz下对特定道路场景进行了成像。这些图像与在微波频率(30吉赫)下运行的步进频率雷达在类似操作参数下生成的雷达图像进行了比较。本文中的图像未经任何显著的图像处理。
A. 150 GHz调频连续波雷达规格与设置
一台150 GHz调频连续波雷达已由俄罗斯圣彼得堡 ELVA‐1根据伯明翰大学的技术规格定制,[14]该雷达的要求
表I 150吉赫和30吉赫雷达参数对比
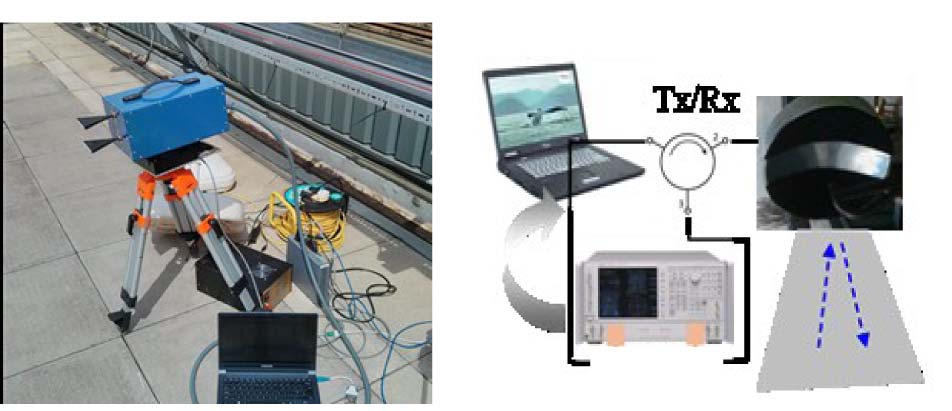
收发天线在单站配置下的设计基于收发器前方道路3至100米范围内的预期照射区域。在10米距离处,所需的最小角度分辨率应达到20厘米,与车辆轮胎宽度相当。这决定了方位面的波束宽度 ΘH、孔径尺寸和增益。因此,设计了两套共址的定制H面喇叭透镜天线,分别为 ΘE= 15◦和 ΘH= 2.2◦,用于发射和接收150吉赫 FMCW信号的6吉赫扫频。该150吉赫雷达安装在转台上,以实现方位向的机械扫描[参见图2(a)]。通过以太网连接,使用笔记本电脑进行数据记录。最初,在受控户外环境下使用校准目标对该雷达的性能进行了测试分析[13]。
B. 30吉赫步进频率雷达设置
参考的30 GHz步进频率雷达由矢量网络分析仪 (VNA)驱动,并使用一个15厘米天线盘的扇形抛物面天线,提供相对较窄的方位波束ΘH= 3.5◦ [见图2(b)]。为了实现长达数百米的距离覆盖范围,通过在E面使用吸波材料进行锥削,将天线孔径的有效尺寸从15厘米减小到4厘米,从而使俯仰波束扩大至约 12◦。该天线用于发射和接收通道,并通过2.5吉赫带宽环行器实现隔离,构成单站配置。
矢量网络分析仪(VNA)将频率从29至31.5吉赫进行扫描,获得2.5吉赫的总带宽。
在表I中,总结了30吉赫和150吉赫雷达的参数。
C. 实验、结果与讨论
在本论文中,我们展示了真实道路场景的静态图像,重点关注来自表面和道路相关感兴趣物体的散射特征。

表II 图4道路场景中使用的物体
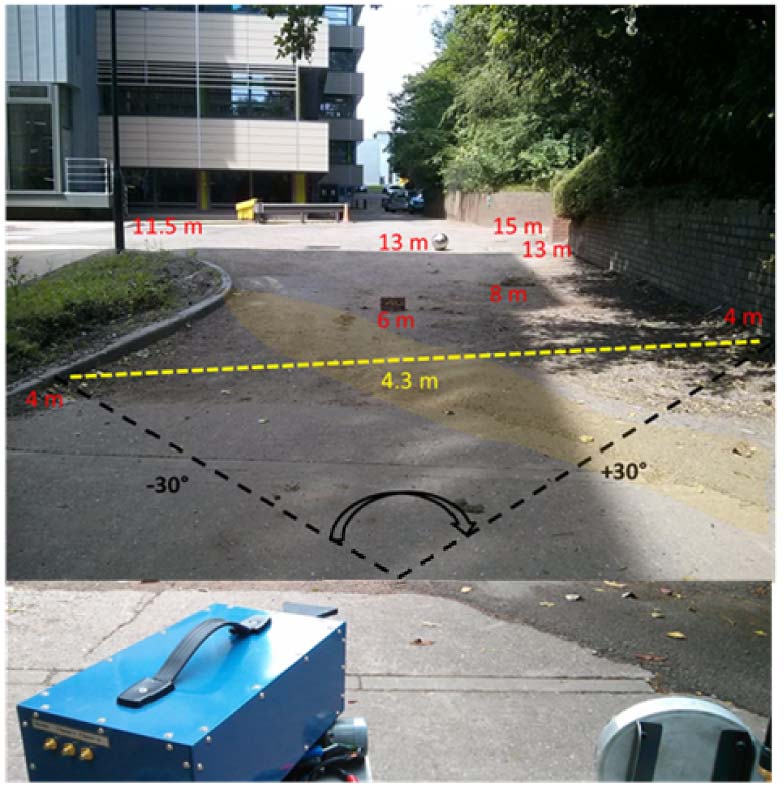
在不同距离处:路缘石、墙壁、路灯杆、小石块和石头。作为参考,在距天线 6 米和 13米 处分别放置了两个具有已知雷达散射截面(RCS)的标准物体——一个球体和一个砖块(见表II)。道路从 −30◦ 到 +30◦ 顺时针扫描,步长为 1◦ 步。 H= 0.8米,且α= 85◦(见图1)。由 150‐吉赫 和 30‐吉赫 雷达生成的两幅雷达图像分别如图4(a) 和 (b) 所示。
图4显示,每个成像物体的距离、角度位置以及回波强度与实际场景相对应。此外,由于150 GHz具有2毫米波长,对表面粗糙度非常敏感。在图像中,来自路缘石和墙壁的回波呈现出近乎连续的线性特征,接近光学质量。
相反,在30吉赫雷达图像中,它们则表现为一组离散斑点,这是雷达影像的典型特征。严格来说,由于距离和角度分辨率存在轻微差异,这两幅雷达图像无法直接比较;然而,只要重点关注不同粗糙度和纹理表面引起的漫散射增加所导致的差异,这种对比仍然是有效的。
值得注意的是,150吉赫信号的扩散散射增强[见图4(a)],使得能够在(通常)粗糙的路面表面上区分出较平滑的区域。在150吉赫图像中,人行道在图3中以黄色标出,由于其路面纹理较其余部分更平滑,后向散射减弱,因此可以清晰识别,而其余部分覆盖有松散的树叶和土壤。
这表明低太赫兹在提供路面纹理和轮廓信息方面具有巨大潜力。作为微波和光学区域之间的边界频率范围,它表现出增强的扩散反射。
 150 GHz调频连续波雷达)
150 GHz调频连续波雷达)
 30 GHz步进频率雷达对图3场景的图像。)
30 GHz步进频率雷达对图3场景的图像。)
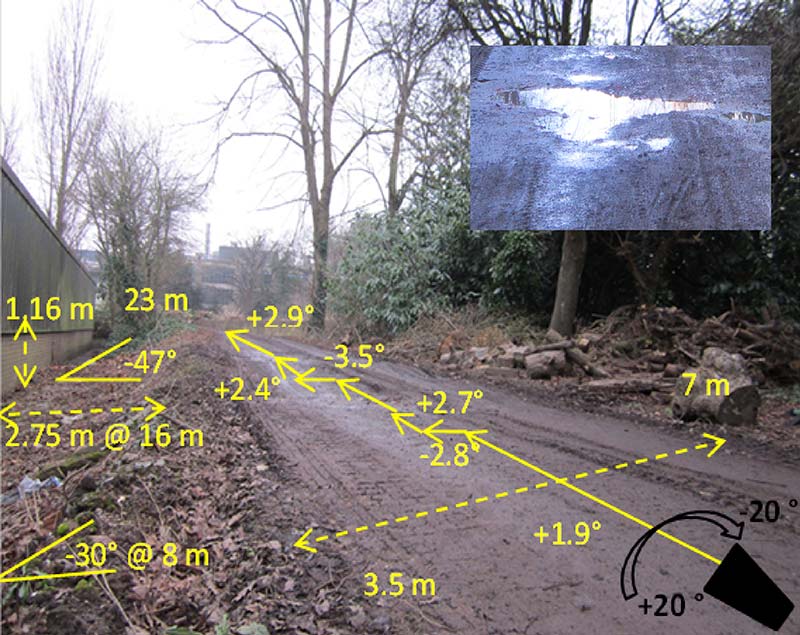
图5显示了一条左侧有沟渠的不平整乡村道路。照片是从路边拍摄的,而雷达位于道路中央,向每侧扫描 20◦。

箭头表示剖面坡度变化:正负角度显示道路和沟渠各自方向上的上升和下降区域。一个倾斜的T形
在雷达信号采集时,5–7.5 m距离处存在一个注满水的坑洼。图6(a)和(b)分别显示了150吉赫和30吉赫下获取的图像。两幅图像均清晰地显示了道路边缘;然而,由于距离分辨率更小且散射回波更强,150吉赫的图像明显更加连续。
在两个频率下,路边的沟渠均显示为道路边缘与围栏之间低反射率的区域。该区域通过颜色的均匀性可轻易识别为阴影区域,在150吉赫图像中更为明显。
T形积水坑洼在两幅图像中均表现为低反射率区域(由于水面的镜面反射使雷达接收到的反射信号减弱),因此可以被识别。然而,150吉赫的图像质量明显更优,图像解译也更为容易。对凹凸物体、坑洼和凸起的识别是该研究的下一阶段内容,将在下一篇论文中进行讨论。
V. 道路标线的150 GHz图像
图7显示了伯明翰大学校园内带有隆声带类型涂料标记的道路照片:在(a)中,雷达位于路边,扫描波束以一定角度指向条带;在(b)中,雷达位于道路上,雷达扫描波束的轴线与隆声带垂直。在两种

 雷达位于道路之上。)
雷达位于道路之上。)
情况下,扫描角度在每侧均为 10◦ 。隆声带相距42厘米,条带宽度为10厘米,涂料厚度约为5–7毫米。
在图8中,展示了雷达位置如图7所示时的150吉赫雷达图像。图(a)中的隆声带在图像左侧清晰可见为对角线。从图像右侧12米和13米处开始的两条较宽对角线对应于路缘石和道路对面路边的矮墙,表明两者之间有1米宽的人行道。此处可明显看到方位向上分辨率像素尺寸的线性增加,这也是在更远距离上线性特征呈离散呈现的原因。在图8(b)的图像中,由于隆声带朝向雷达,其表现更为连续。
图7(a)和(b)展示了两种不同入射角场景的对比。显然,只有在图7(b)的场景中,隆声带才会向雷达产生镜面回波;在此情况下,雷达波束垂直于条带。而在图7(a)的情况下,仅预期存在非镜面反射。然而,从图8可以明显看出,两种场景下隆声带的反射功率相似。这一结果表明,在太赫兹频率下即使表面根据视觉/光学观察仅显得略微粗糙,仍表现出主导的漫散射。左侧的多个亮斑是出现在扫描区域边缘的停放车辆角落的反射。接收功率已归一化至0分贝。
为了研究减速带反射率与其高度之间的依赖关系,我们设置了一个严格控制的实验。通过一家专业从事路面维护的公司,制作了四种不同高度的多个模拟减速带。不同的高度是通过在表面堆叠多层热塑性热熔漆实现的。
对应于图7(a)所示道路场景和雷达位置的图像。此处应为图 7(b)。以一定角度扫描减速带。)
对应于图7场景的图像。垂直于减速带扫描(正入射)。)
基底为商用纹理乙烯基(油地毡)地板,近似厚度为1.1毫米。热塑性材料是英国道路标线的工业标准材料。每层涂料的厚度约为2‐3毫米。在乙烯基基底上涂覆一至四层热塑性材料,可分别形成约4毫米、7毫米、10毫米和12毫米的总条高度。制作了四组宽度为10厘米的减速带,每组包含两条。特制的热塑性条带以距离雷达约5‐6米处,并与天线轴线成15◦角度放置。两条减速带之间的间距约为30厘米。
图9显示了得到的图像。可以看出,人工制作的条纹在所有四幅图像中均可见。图10绘制了四种不同高度下的归一化接收功率,并与150 GHz时的解析雷达散射截面近似[15]进行了比较。为了展示来自条纹的反射功率的下降情况,接收功率已调整至图8中的最小功率(−30 dB)。
4毫米)
7毫米)
10毫米)
12毫米)
可以得出以下几个结论:1)高度最小(4毫米)的条带仍然可见;2)每个条带的反射来自对应于条带宽度的三个连续分辨率单元,这表明2毫米波长对地面与条带材料粗糙度差异的敏感性;3)在30吉赫下的分析结果表明,条带反射面/边缘的反射降低了约14分贝。这极大地降低了条带的可见性。在我们的参考测量中,当使用30吉赫照射时,所有条带(不同高度)均不可见。
六、结论
初步的150吉赫实验结果表明,由于低太赫兹雷达传感器对成像物体的轻微粗糙度和纹理具有高灵敏度,因此其在提供道路环境高分辨率图像方面具有潜力。研究表明,原始图像由于与光学图像相似,适合用于视觉特征检测和解释。通过进一步的图像处理和特征提取技术,将有望实现更优的自动特征检测。这将是后续工作的研究内容。
在本研究的下一阶段,将分析300和600吉赫双频段在室外成像中的能力。

















 774
774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









