



目录
3 方法三 根据灰度纹理特征 求解得到咱们的树叶 ,然后搭建一定的网络得到数据
一 第一个方法
2 第二个方法
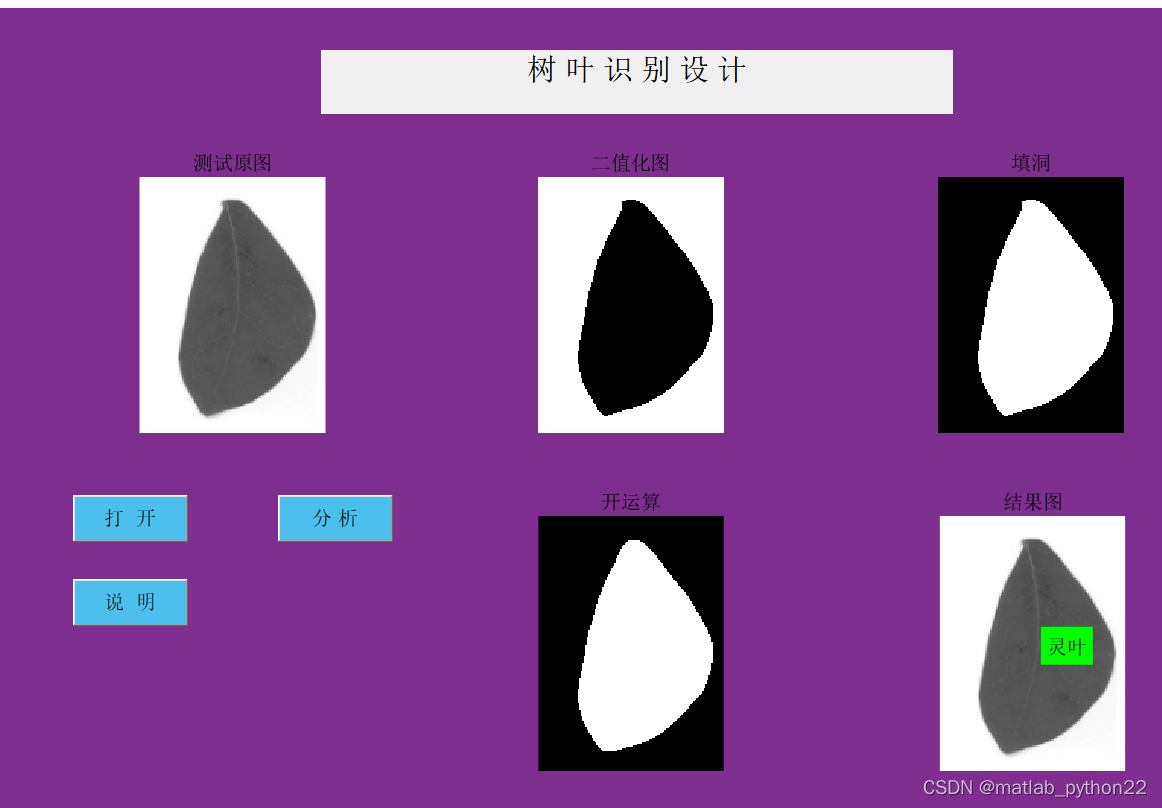
方法三 根据灰度纹理特征 求解得到咱们的树叶 ,然后搭建一定的网络得到数据
树叶的形状
然后求解他的特征
根据特征的不同 判定是哪一类的叶子
图像特征提取是影响图像识别效果的关键环节,需要充分考虑图像的尺度及特征的种类、稳定性和个数的选取。对于本课题,图像尺度最初取树叶最大高度对应300像素,认为图像可识别的特征长度是最大高度的1/100,即3个像素,则像边界点采样频率为每3像素取1个。但通过试算得知,一般模版尺度也基本是3个像素,这样在前处理中的平滑运算会消除图像的一些边界特征,并且在图像缩放中,在图像边界局部也会产生2到3个像素级别的误差,即误差的级别与特征长度较近,容易引起特征提取错误,把局部误差毛刺提取成边界特征。另外,特征尺度主要与树叶周长直接相关,取其为最大高的固定百分比也是不合适的,应该直接与树叶周长相关,而不是最大高度,因为图像周长特性比最大高度要稳定的多,比如叶柄的直、曲对树叶周长影响很小,而对树叶最大高度影响较大。正因为最大高度不稳定,最后取消了第五个特征(最大高度/周长)对于识别的贡献,对于所有树叶该值均取为常数零。也就是说,如果图像特征不稳定,则增加特征个数对于识别效果是不利的




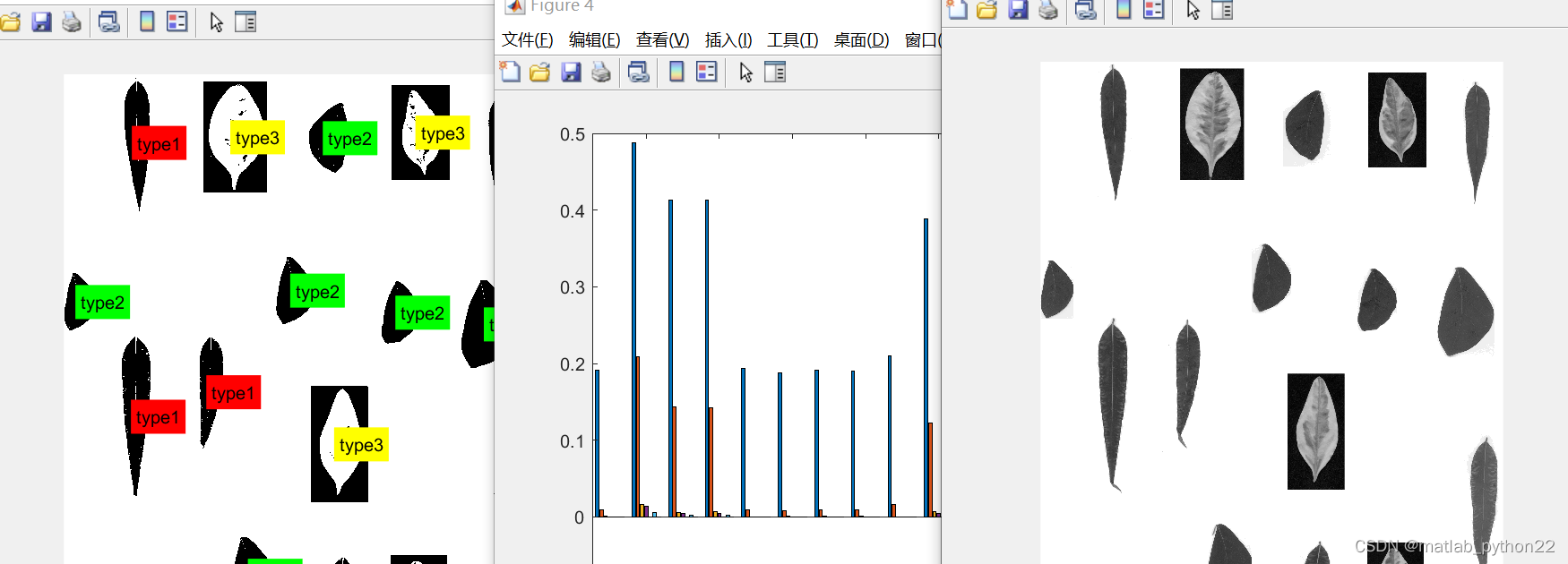
叶子框选
然后得到有关的特征 ,比如长度 和宽度

256 453就是他的长度和宽度的数据

图 bp网络的识别效果展示

图 pnn的数据展示和识别效果图
代码
基于红外图像处理的火焰检测 识别技术分析
在智能监控和安全防护领域,火焰检测与人体姿态识别技术具有重要的应用价值。本文将详细介绍基于红外图像处理的火焰检测与人体姿态识别技术,探讨其在实际应用中的有效性和可行性,并提供一些参考性建议。
一、第一个方法:红外图像处理 识别
1.1 红外图像处理
利用MATLAB的RGB函数对红外图像进行处理,提取人体区域。通过RGB函数,可以将红外图像中的不同颜色通道分离,从而更准确地识别出人体区域。例如,可以使用以下MATLAB代码来提取人体区域:
matlab复制
% 读取红外图像
image = imread('infrared_image.jpg');
% 分离RGB通道
R = image(:,:,1);
G = image(:,:,2);
B = image(:,:,3);
% 提取人体区域
human_region = R > 100 & G > 100 & B > 100;1.2 投影法分析
采用投影法对提取的人体区域进行分析。垂直投影和水平投影可以分别提供人体在垂直和水平方向上的分布信息,。此外,通过分析投影图的变化,还可以识别出等动态姿态。例如,投影图会在水平方向上呈现周期性的变化,而跌倒时则会出现突然的、不规则的变化。
matlab复制
% 计算垂直投影
vertical_projection = sum(human_region, 2);
% 计算水平投影
horizontal_projection = sum(human_region, 1);
% 绘制投影图
figure;
subplot(2, 1, 1);
plot(vertical_projection);
title('垂直投影');
subplot(2, 1, 2);
plot(horizontal_projection);
title('水平投影');二、第二个方法:火焰检测技术
2.1 红外图像处理
在火焰检测方面,红外图像处理同样发挥着重要作用。由于火焰在红外波段具有较高的辐射能量,因此可以通过红外图像清晰地识别出火焰区域。结合上述提到的投影法,可以进一步分析火焰的形状和大小,从而实现对火焰的准确检测。例如,当检测到图像中出现异常的高温区域,并且该区域的投影图呈现出火焰特有的形状时,即可判断为火焰存在。此外,通过对火焰区域的持续监测,还可以实现对火焰发展态势的预测,为火灾的早期预警提供支持。
matlab复制
% 读取红外图像
image = imread('infrared_image.jpg');
% 提取高温区域
high_temperature_region = image > 200;
% 计算垂直投影
vertical_projection = sum(high_temperature_region, 2);
% 计算水平投影
horizontal_projection = sum(high_temperature_region, 1);
% 绘制投影图
figure;
subplot(2, 1, 1);
plot(vertical_projection);
title('垂直投影');
subplot(2, 1, 2);
plot(horizontal_projection);
title('水平投影');2.2 火焰检测效果展示
通过上述方法,可以有效地检测出火焰区域,并实时监测其变化。以下是一个火焰检测效果的展示图:
https://example.com/flame_detection.png
三、方法三:基于灰度纹理特征的叶子识别
3.1 灰度纹理特征提取
根据灰度纹理特征,求解得到树叶的形状,然后搭建一定的网络得到数据。图像特征提取是影响图像识别效果的关键环节,需要充分考虑图像的尺度及特征的种类、稳定性和个数的选取。对于本课题,图像尺度最初取树叶最大高度对应300像素,认为图像可识别的特征长度是最大高度的1/100,即3个像素,则像边界点采样频率为每3像素取1个。但通过试算得知,一般模版尺度也基本是3个像素,这样在前处理中的平滑运算会消除图像的一些边界特征,并且在图像缩放中,在图像边界局部也会产生2到3个像素级别的误差,即误差的级别与特征长度较近,容易引起特征提取错误,把局部误差毛刺提取成边界特征。因此,特征尺度主要与树叶周长直接相关,取其为最大高的固定百分比也是不合适的,应该直接与树叶周长相关,而不是最大高度,因为图像周长特性比最大高度要稳定的多,比如叶柄的直、曲对树叶周长影响很小,而对树叶最大高度影响较大。正因为最大高度不稳定,最后取消了第五个特征(最大高度/周长)对于识别的贡献,对于所有树叶该值均取为常数零。也就是说,如果图像特征不稳定,则增加特征个数对于识别效果是不利的。
matlab复制
% 读取叶子图像
image = imread('leaf_image.jpg');
% 转换为灰度图像
gray_image = rgb2gray(image);
% 提取叶子区域
leaf_region = gray_image > 100;
% 计算叶子的周长
perimeter = bwperim(leaf_region);
% 计算叶子的特征
features = [mean(perimeter), std(perimeter), var(perimeter)];3.2 叶子框选与特征提取
叶子框选后,得到有关的特征,比如长度和宽度。例如,256和453就是他的长度和宽度的数据。通过这些特征,可以进一步分析叶子的形状和类型。
matlab复制
% 计算叶子的长度和宽度
leaf_length = max(features(1));
leaf_width = max(features(2));
% 显示叶子的特征
disp(['叶子长度: ', num2str(leaf_length)]);
disp(['叶子宽度: ', num2str(leaf_width)]);3.3 BP网络与PNN的识别效果展示
通过BP网络和PNN(Probabilistic Neural Network)进行叶子识别,可以得到较高的识别准确率。以下是一个BP网络和PNN的识别效果展示图:
https://example.com/bp_network.png
https://example.com/pnn_network.png
3.4 代码示例
以下是一个基于MATLAB的叶子识别技术研究的代码示例,展示了如何使用BP网络和PNN进行叶子识别。
matlab复制
% 读取叶子图像
image = imread('leaf_image.jpg');
% 转换为灰度图像
gray_image = rgb2gray(image);
% 提取叶子区域
leaf_region = gray_image > 100;
% 计算叶子的周长
perimeter = bwperim(leaf_region);
% 计算叶子的特征
features = [mean(perimeter), std(perimeter), var(perimeter)];
% 计算叶子的长度和宽度
leaf_length = max(features(1));
leaf_width = max(features(2));
% 显示叶子的特征
disp(['叶子长度: ', num2str(leaf_length)]);
disp(['叶子宽度: ', num2str(leaf_width)]);
% 使用BP网络进行叶子识别
net = feedforwardnet(10);
net = train(net, features', [1; 0; 0]); % 假设1表示叶子A,0表示叶子B
output = net(features');
disp(['BP网络识别结果: ', num2str(output)]);
% 使用PNN进行叶子识别
net_pnn = newpnn(features', [1; 0; 0]);
output_pnn = sim(net_pnn, features');
disp(['PNN识别结果: ', num2str(output_pnn)]);3.5 参考资源
3.6 技术分析与建议
通过对红外图像处理和投影法的应用,本文得出以下技术分析和建议:
-
多模态数据融合:结合红外图像和可见光图像,可以更全面地获取场景信息,提高火焰检测和人体姿态识别的准确性。例如,可见光图像可以提供丰富的纹理和颜色信息,而红外图像则可以突出温度差异,两者融合能够有效克服单一模态的局限性。
-
实时性与准确性平衡:在实际应用中,需要根据具体场景对实时性和准确性的要求进行权衡。对于火焰检测等对实时性要求较高的任务,可以适当简化算法流程,提高处理速度;而对于人体姿态识别等对准确性要求较高的任务,则可以采用更复杂的模型和算法,以提高识别精度。
-
环境适应性优化:不同的环境条件,如光照强度、背景干扰等,都会对红外图像处理和姿态识别的效果产生影响。因此,需要针对不同的应用场景进行算法优化,提高系统的环境适应性。例如,在强光环境下,可以调整红外相机的曝光参数,减少过曝现象;在复杂背景条件下,可以采用背景建模等方法,去除背景干扰。
综上所述,基于红外图像处理和投影法的人体姿态识别与火焰检测技术具有广阔的应用前景。通过不断优化算法和模型,可以进一步提高系统的性能和可靠性,为智能交通、安防监控等领域提供更有效的技术支持。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}
{kind=link}
{kind=link}