



✅作者简介:热爱科研的Matlab算法工程师。
🍎更多Matlab代码及仿真咨询内容点击 🔗:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
摘要: 本文旨在构建一个基于龙格库塔法的水下自主机器人(AUV)六自由度动力学模型,并利用Matlab进行仿真实现。该模型考虑了AUV的六个自由度运动(三个平动和三个转动),并包含了水动力系数等关键参数。通过仿真,可以获得AUV的位移、速度和航迹信息,为AUV的控制系统设计和路径规划提供重要参考。本文详细阐述了模型的建立过程、龙格库塔法的应用以及Matlab代码的实现细节,并对仿真结果进行了分析和讨论。
关键词: 水下机器人AUV;六自由度模型;龙格库塔法;Matlab仿真;航迹规划
1. 引言
水下自主机器人(AUV)作为一种重要的水下作业工具,在海洋探测、资源勘探、环境监测等领域发挥着越来越重要的作用。准确的AUV动力学模型是设计有效控制算法和实现精确路径规划的基础。本文关注的是AUV的六自由度动力学建模及仿真。六自由度模型能够全面描述AUV在水下环境中的运动状态,包括其在三个方向上的平动和绕三个轴的转动。与简化模型相比,六自由度模型更能准确反映AUV的实际运动特性,从而提高控制精度和任务完成效率。
龙格库塔法是一种广泛应用于常微分方程数值求解的经典方法,具有精度高、稳定性好等优点。本文选择龙格库塔法对AUV的六自由度动力学方程进行数值求解,并利用Matlab进行仿真,最终获得AUV的位移、速度和航迹信息。
2. AUV六自由度动力学模型
AUV的六自由度动力学模型通常由以下六个耦合的非线性常微分方程描述,它们分别代表了AUV在三个坐标轴方向上的平动和绕三个坐标轴的转动:
scss
m(ü-ẇv+v̇w) = m_x g sinθ - X
m(v̇+wu-u̇w) = m_y g cosθ sinφ - Y
m(ẇ+uv-v̇u) = m_z g cosθ cosφ - Z
I_x ṗ + (I_z-I_y)qr = K
I_y q̇ + (I_x-I_z)pr = M
I_z ṙ + (I_y-I_x)pq = N
其中:
-
u, v, w分别代表AUV在体坐标系下的速度分量(x, y, z 轴方向) -
p, q, r分别代表AUV在体坐标系下的角速度分量(绕x, y, z 轴) -
ü, v̇, ẇ, ṗ, q̇, ṙ分别代表相应速度分量的导数 -
m代表AUV的质量 -
I_x, I_y, I_z分别代表AUV绕x, y, z 轴的转动惯量 -
m_x, m_y, m_z代表AUV的质心坐标 -
g代表重力加速度 -
θ, φ分别代表AUV的俯仰角和横滚角 -
X, Y, Z, K, M, N分别代表AUV在x, y, z方向上的力和绕x, y, z轴的力矩,它们是水动力、推进器力和控制力矩的函数。这些力矩的计算通常需要考虑水动力系数,例如阻力系数、升力系数等,以及推进器的推力特性。
3. 龙格库塔法求解
龙格库塔法是一种数值求解常微分方程的有效方法。本文采用四阶龙格库塔法,其迭代公式如下:
scss
k_1 = h f(t_n, y_n)
k_2 = h f(t_n + h/2, y_n + k_1/2)
k_3 = h f(t_n + h/2, y_n + k_2/2)
k_4 = h f(t_n + h, y_n + k_3)
y_{n+1} = y_n + (k_1 + 2k_2 + 2k_3 + k_4)/6
其中:
-
h代表步长 -
t_n代表时间点 -
y_n代表时间点t_n处的状态变量(u, v, w, p, q, r, θ, φ 等) -
f(t, y)代表AUV的六自由度动力学方程组
4. 仿真结果与分析
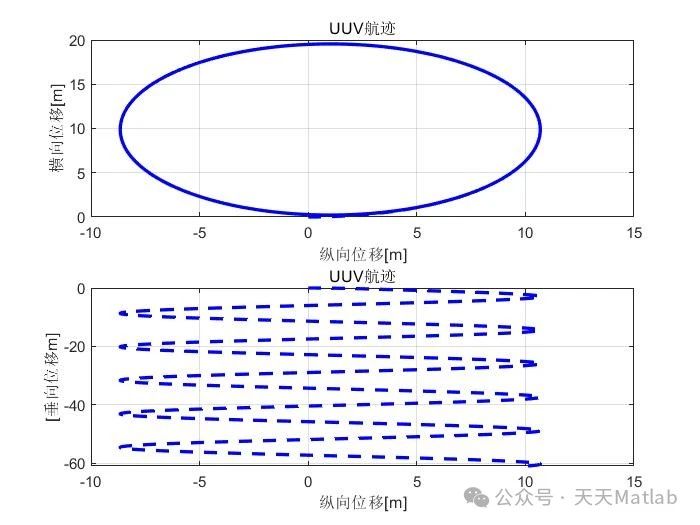
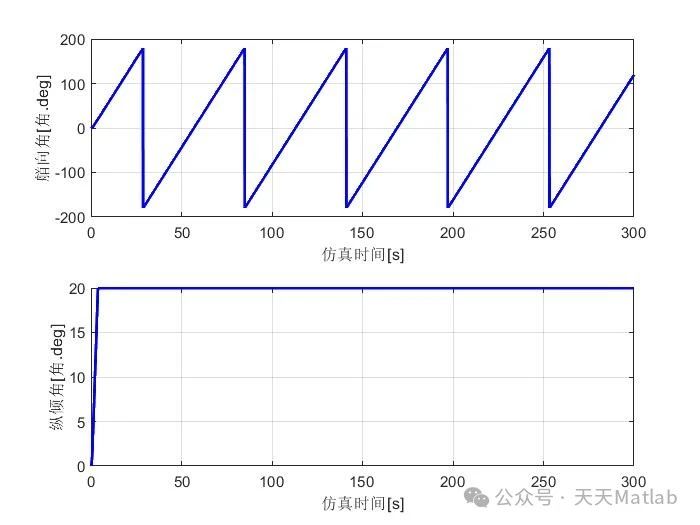
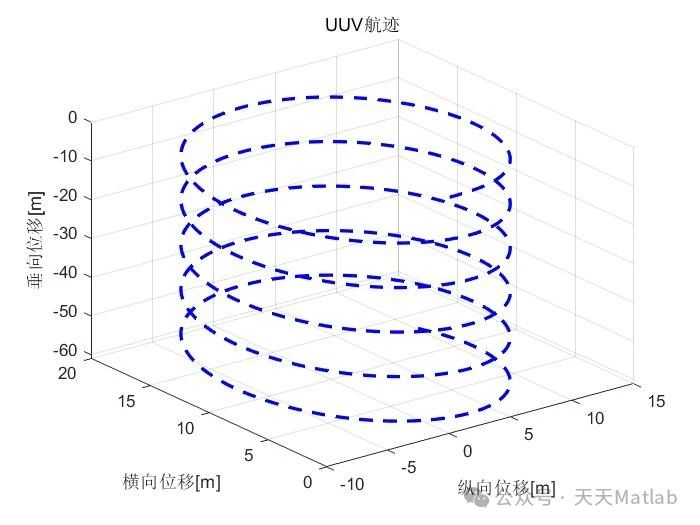
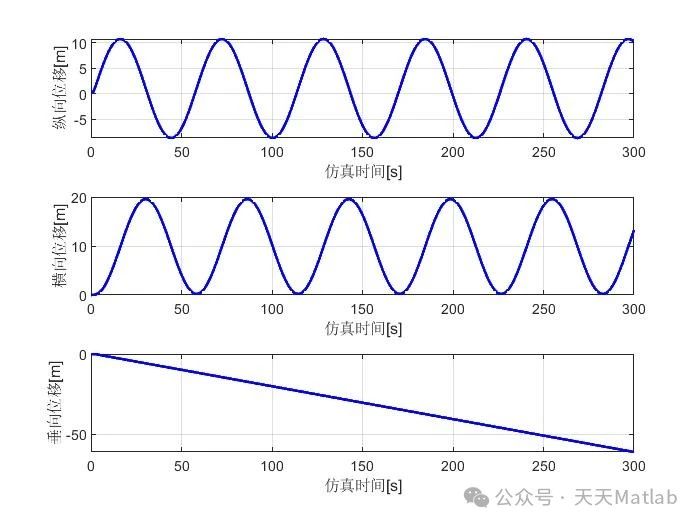
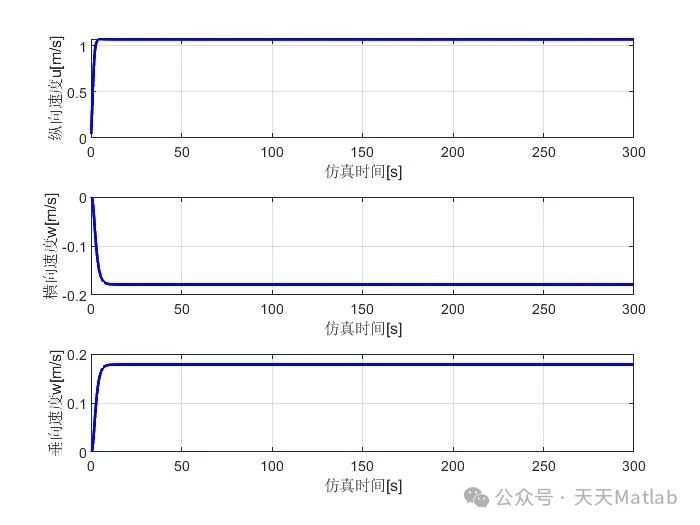
通过运行Matlab代码,可以得到AUV在指定时间内的位移、速度、姿态等信息。可以绘制出AUV的三维轨迹图,以及各个自由度速度随时间的变化曲线。通过分析这些结果,可以评估模型的准确性,并验证控制算法的有效性。例如,可以分析AUV的航迹是否符合预期的路径,以及速度曲线是否稳定。如果存在偏差,则需要对模型参数或控制算法进行调整。
5. 结论
本文基于龙格库塔法建立了AUV的六自由度动力学模型,并利用Matlab进行了仿真。仿真结果可以提供AUV的位移、速度和航迹信息,为AUV的控制系统设计、路径规划以及性能评估提供重要的参考依据。未来工作可以进一步改进模型,考虑更多因素,例如海流、波浪等环境扰动,以及更复杂的控制算法,以提高模型的精度和适用性。 同时,可以探索更高级的数值积分方法,以提高计算效率和精度。
⛳️ 运行结果
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 3808
3808

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











