



ICARE系统在儿童治疗中的改进
有效的步态治疗对于因发育、神经或骨科问题而导致行走困难的儿童至关重要。目前的步态训练技术成本高昂,且通常无法满足不同体型儿童的需求。此外,临床医生常常需要为严重肌力不足的儿童提供大量身体辅助。基于椭圆轨迹式智能控制辅助康复椭圆机(ICARE)系统在成人步态训练中的成功应用,研究人员提出了一种改进技术,以满足年幼/体型较小儿童的需求。新设计采用螺杆滑块关节来调节椭圆机构中曲柄连杆的有效长度,同时减小步长和步高。脚踏板的新运动轨迹相对于步长进行了归一化处理,结果显示儿童步态与成人步态的轨迹几乎相同。仿真结果和人体可用性研究验证了该设计的可行性。[DOI: 10.1115/1.4030276]
1 背景
行走能力为儿童探索世界、学习知识和保持健康创造了机会。在发生严重的意外、损伤、手术或疾病后,一些儿童会出现行走困难。通常建议采用步态治疗,通过高强度和重复性的踏步训练来提高儿童的行走能力。
传统的儿童步态再训练方法包括临床医生辅助的人工地面步态训练、部分减重支持跑步机训练以及机器人疗法。临床医生在人工地面步态治疗和部分减重支持跑步机训练中提供的辅助往往体力消耗极大。而机器人设备通常非常昂贵,限制了其广泛使用。
为了克服成人步态训练中的类似障碍,我们的研究团队开发了ICARE系统,这是一种经济实惠的工具,可用于促进患有身体残疾和慢性疾病的成年人进行类似步态的运动模式[1–4]。与之前的步态治疗系统不同,ICARE不需要对下肢各个关节的屈伸进行严格控制。相反,ICARE通过“椭圆形”路径引导患者的脚,松散地模拟地面行走时脚部的轨迹[4]。ICARE如图1所示。

集成电机可适应不同水平的下肢力量,使肌肉较弱的肌群能够在无需过度用力的情况下进行锻炼[2,5–7]。通过调整训练速度和外部减重支持水平,可定制腿部所承受的肌肉负荷[2]。人机工程学改进提高了系统的可用性,同时减少了对患者的不必要应力,并将控制重点集中于有效的运动学治疗和锻炼[3,5–7]。总体而言,ICARE系统已被证明对成年患者有效、舒适且安全。
基于成人ICARE系统的成功,研究人员决定修改该系统以满足年幼儿童的需求。
2 儿科使用ICARE系统的考虑
儿童的步态运动与成人步态运动非常相似。萨瑟兰指出,儿童步态似乎在两岁时“成熟”,以符合成人步行的特征[8]。对1至7岁儿童绘制的无量纲数据显示,腿长与步长之间存在显著相关性。进一步分析表明,步长相对于年龄存在成熟过程[8]。
ICARE系统生成类似步态运动轨迹的方法不同于当前用于步态治疗的其他技术。特别是,ICARE通过远端控制点(即脚踏板上的脚)推动肢体完成连续的运动周期。相比之下,机器人设备通常专注于操控关节运动和力,以产生可接受的步态模式。成人ICARE的去中心化特性使其只需调整步长和频率(即步频),即可适应不同的患者。
为了适应儿童较小的身体尺寸,对成人ICARE系统进行修改时,必须考虑将儿童步态与成人步态相关联的归一化因素。根据Hof的观点,每个步态参数都可以用体重、腿长、步频和重力常数[9]来定义。ICARE的电机系统会自动调节以满足不同体重个体的辅助需求,而该设备的去中心化特性意味着其性能对腿长的依赖性小于对步长的依赖性。因此,精确控制步长和步频对于确保ICARE系统的修改能够成功用于儿科患者至关重要。
ICARE系统基于一种改进的曲柄摇杆四杆机构(见参考文献[1])。步长和步频与ICARE系统上的曲柄长度和角速度密切相关。最大脚部高度与曲柄长度相关,但也与其他参数有关。因此,最初针对儿科使用对ICARE进行改进的努力集中在曲柄的可调节性上。
3 设计说明
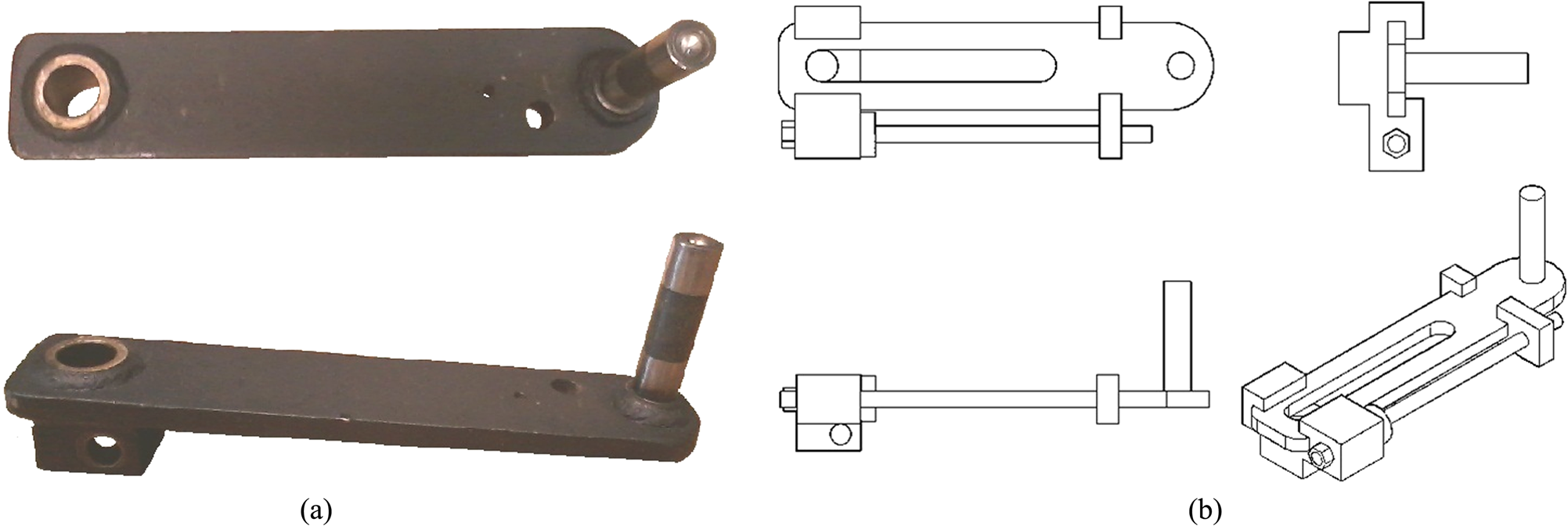
在现有的ICARE上,曲柄是一个通过定位销刚性连接到轴上的金属实心件,并连接到末端带有旋转关节的连杆。为了调节曲柄的长度,轴与旋转关节之间的距离必须是可变的。
研究人员设计了一种三件式机构来替代曲柄。该新型曲柄机构由一个可移动的轴连接支架、螺杆和衬套以及一个开槽曲柄组成。螺钉通过旋转关节与曲柄连接,并由衬套进行约束。螺钉的另一端旋入轴连接支架上的螺纹孔中。轴连接支架可沿曲柄自由滑动,形成移动关节。当螺钉转动时,其在旋转关节中自由旋转,并使轴连接支架相对于曲柄垂直移动。通过此设计,轴向载荷通过螺钉从曲柄传递到轴连接支架,而剪切和弯曲载荷则直接从曲柄传递到连接支架。新旧曲柄设计的比较见图2。
为简化设计,仅需更换曲柄机构,而无需重建、拆除或重新设计其他任何部件以适应新的改进型曲柄。这导致了严格的空间限制。因此,螺钉被安装在轴连接支架和曲柄的侧面。
在原始设计中,轴心与连杆的旋转关节之间的中心距为8.25英寸。在新设计中,中心距可进行调整,从8.25英寸调整到3.25英寸。当脚踏板在连杆上尽可能向前设置时,通过调节曲柄机构的长度,步长(即同侧与对侧足跟之间的最大水平前后距离)可从18.5英寸调整到7.5英寸。此外,利用ICARE系统原有的调节功能(通过调整曲柄摇杆机构中的有效摇杆长度),仍有可能进一步增加步长。
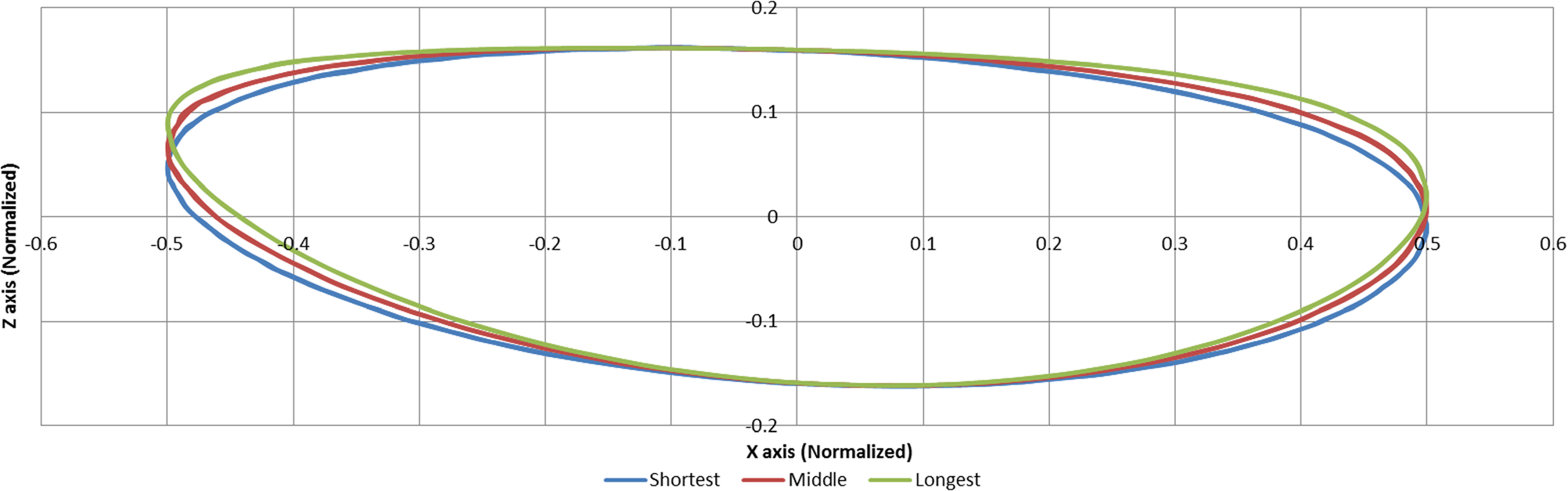
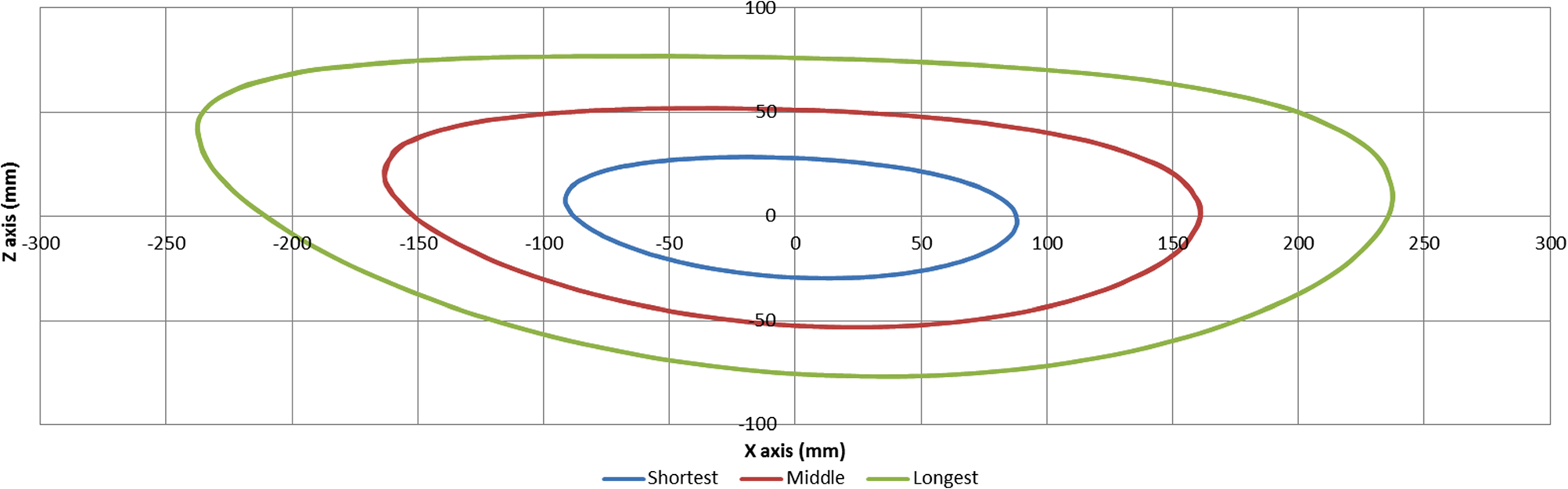
为评估曲柄长度对连杆轨迹的影响,记录了ICARE脚踏板的三维运动。反光标记物被附着在ICARE脚踏板的后外侧面。使用12相机动作捕捉系统(瑞典哥德堡Qualisys AB公司)在最短、中等和最长曲柄长度下,以120赫兹的频率记录了十个连续周期的脚踏轨迹数据。改进型机构的脚踏板路径如图3所示。随着步长减小,脚部路径高度也显著降低。最短曲柄长度与最长曲柄长度下的脚踏板轨迹非常相似。在基于步长对轨迹进行归一化后,轨迹之间的微小差异如图4所示。由于归一化的儿童步态数据与成人步态高度相似,类似的归一化椭圆路径应有利于儿科患者。因此,新型曲柄机构设计被认为成功再现了适用于儿科患者的成人步态训练运动学特征。
4 部件选择
改进的儿童ICARE设计最大承重为250磅。当未使用体重支撑功能时,患者在步态周期中通过双脚在两个踏板之间转移,将全部体重分布在两个踏板上。由于脚踏板与摇杆机构距离较近,患者的大部分重量将由摇杆承担,从而限制了曲柄上的负载。出于安全考虑,曲柄机构的设计假设患者全部体重都施加在连杆上靠近曲柄旋转关节连接处的位置(即最不利的加载情况)。假设连杆重量和踏板附件重量约为20磅。因此,通过改进的曲柄机构传递的测试重量为270磅。
最小螺钉尺寸由载荷要求确定。在一个循环中,螺钉在拉伸和压缩状态下承受了患者和连杆的全部重量。螺钉中的轴向应力由以下公式给出:
$$ \sigma_a = \frac{F}{A_{eff}} = \frac{4F}{\pi d_r^2} $$
其中F是施加的载荷,$A_{eff}$是有效横截面积,$d_r$是最小螺钉直径。
螺钉上最关键的受力位置是螺钉与轴连接支架之间的螺纹接触处。根据布丁纳斯和尼贝特的研究,对螺钉的实验表明,只有前七个啮合螺纹承受载荷,其中第一个啮合螺纹承受38%的载荷,后续螺纹承受的载荷依次减少[10]。由于螺钉的接触发生在螺纹上,因此力作用在偏心倾斜面上,存在横向力和剪切力。横向力和剪切力由以下公式给出:
$$ \sigma_x = \frac{6F}{\pi d_r n_t p} \cdot \frac{s_y}{z} = \frac{16T}{\pi d_r^3} $$
其中,$n_t$为旋合螺纹的牙数,$p$为螺距。$T$为克服施加在螺钉上的载荷所需的扭矩,由下式给出:
$$ T = \frac{F d_m}{2} \left( \frac{l + \pi f d_m \sec \alpha}{\pi d_m - f l \sec \alpha} \right) + \frac{F f_c d_c}{2} $$
其中,$d_m$为中径,$f$为螺钉与支架之间的摩擦系数,$l$为螺杆导程,$\alpha$为牙型角,$f_c$为螺母外圈与支架之间的摩擦系数,$d_c$为螺母外圈平均直径。
为了确定螺钉与轴连接支架连接处的最大应力,将力代入0.38F,并令$n_t$为1个螺纹。
表1显示了3/8–12 ACME螺纹杆和轴环的数值。使用这些数值,
$$ T = 21.09 \text{ in·lb}, \quad \sigma_a = 4,040.18 \text{ psi}, \quad \sigma_x = 8,061.12 \text{ psi}, \quad \tau_{yz} = 4,327.53 \text{ psi} $$
冯·米塞斯应力为14,485 psi,最大剪切应力为5408 psi。使用最小抗拉强度为45 kpsi的冷拉1018钢,在3/8–12 ACME螺纹杆上承受270磅轴向载荷时,安全系数为3.107。
| 变量 | 值 |
|---|---|
| F | 270 磅 |
| $d_r$ | 0.2917 英寸 |
| $d_m$ | 0.3333 英寸 |
| p | 0.08333 英寸 |
| l | 0.2708 英寸 |
| $\alpha$ | 14.5 度 |
| f | 0.08 |
| $f_c$ | 0.08 |
| $d_c$ | 0.5 英寸 |
根据所述的加载配置,螺纹杆会发生一些弯曲。弯曲载荷的影响是显著的,会增加螺钉在加载过程中所承受的应力。这在第7节中解释。
5 仿真模型与方法
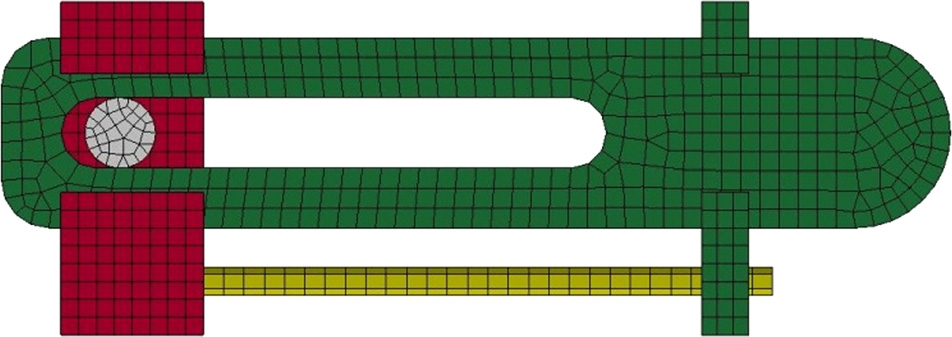
曲柄、轴连接支架和螺钉使用 LS-DYNA 显式非线性有限元仿真软件(利弗莫尔软件技术公司,加利福尼亚州利弗莫尔)[11]进行建模。
每个部件均被建模为在弹性载荷下的 A36 钢。部件由 5 毫米长的立方体实体单元构成。载荷均匀施加在曲柄与连杆之间的旋转关节处。轴被模拟为穿过曲柄机构的刚性圆柱体。轴连接支架刚性地固定在轴上,而曲柄则允许绕轴旋转。3/8–12 螺钉被简化为直径 0.2917 英寸的管状结构,并刚性连接至曲柄和轴连接支架。仿真模型如图5所示。
最初,轴位于曲柄槽的底部。然而,改变曲柄槽内轴的位置表明,当轴位于槽底部上方约 0.25 英寸时,为最危险的位置。随着曲柄机构缩短,最大应力减小。
还研究了曲柄与轴之间的接触,并在几次仿真中省略了该接触,以表示曲柄中的公差可能在实际装配中避免轴接触。在有限元仿真中,由于基于罚函数的接触而产生的摩擦可能难以计算。因此,改变摩擦系数以确定摩擦的影响非常重要。该方法往往会产生对接触力的保守估计。
在仿真过程中,发现轴连接支架与曲柄之间的摩擦对最大应力有显著影响。降低摩擦系数后,观察了结果。
在基于罚函数的接触中,接触力取决于组件的网格。较粗的网格往往会产生更高的接触力和应力,而更细的网格则更“柔软”,能够缓解一些刚性接触点。为了进行比较,网格被细化为 1.6 毫米长的立方体实体单元。
对曲柄组件进行了静态分析。在四个方向上对曲柄机构施加了载荷,对应于轴向和横向加载。记录了每次仿真中曲柄和螺钉的最大应力。
曲柄组件还进行了动态建模。给曲柄机构施加了旋转速度,模拟轴旋转。曲柄以 1 转/秒的速率旋转,同时承受 270 磅的恒定向下载荷。
6 仿真结果
在静态仿真过程中,最大应力位于曲柄槽底部周围,出现在从与轴连接支架接触处延伸的剪切面上。对于螺钉,最大应力出现在螺钉与轴连接支架的连接处。
研究发现,降低曲柄与轴连接支架之间的摩擦会增加曲柄中的接触应力。然而,随着曲柄与轴连接支架之间摩擦的增加,螺钉中观察到的最大应力也随之增加。不过,在实际装配中不太可能出现极低的摩擦值,因此观察到的最大应力值是保守的。
每次仿真结果均表明,移除曲柄与轴之间的接触会导致曲柄内的应力升高。由于在每次仿真中最大应力均出现在槽口周围,因此轴接触起到了增强槽口强度的作用。因此,仿真预测如果轴与曲柄之间的公差过大,导致曲柄和轴松动时,曲柄将承受更大的应力值。
静态加载粗网格仿真模型的最大观测应力值如表2所示。在垂直方向上,对曲柄和螺钉进行拉伸加载时,观测到的最大应力最低。当进行压缩加载时,应力更大,部分原因是螺钉发生轻微的横向挠度,从而引起典型的柱屈曲模式的弯曲应力。然而,轴向加载期间观测到的应力在可接受范围内,且曲柄在轴向载荷下表现良好。
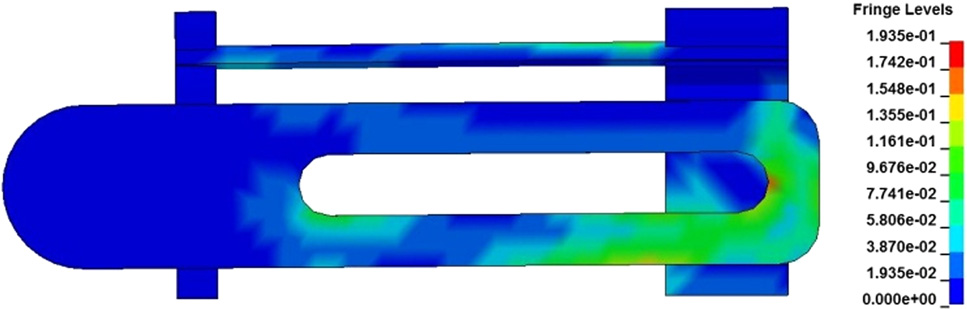
在侧向,应力显著更大。轴连接支架的角落与曲柄之间的接触力产生了高应力剪切面,这些剪切面从外部接触表面延伸至槽口。剪切面如图6所示。
低等级热轧钢的屈服强度至少为 33 千磅每平方英寸。由于粗网格模拟中预测的应力较高,该机构无法使用低性能或普通钢材制造。因此决定,曲柄机构应采用最小屈服强度为 60 千磅每平方英寸的冷轧钢制造。尽管这会显著增加成本,但至少 1.97 的安全系数,结合保守的应力估算和载荷条件,意味着该机构极不可能失效。
网格进行了细化,并使用更细的网格来仿真曲柄机构的横向加载。更细网格的长度尺度约为粗网格的三分之一。曲柄机构在粗网格和细网格模型之间的行为几乎相同,但细网格模型的应力显著降低。应力值见表3。
| 加载方向 | 最大观测值 曲柄应力 | 最大观测值 螺钉中的应力 |
|---|---|---|
| 侧向朝向非螺钉侧 | 18.948 千磅每平方英寸 | 12.590 千磅每平方英寸 |
| 最小安全系数:3.17 | ||
| 侧向朝向螺钉侧 | 17.827 千磅每平方英寸 | 13.992 千磅每平方英寸 |
| 最小安全系数:3.22 |
曲柄机构以 1 转/秒的速度旋转,并施加恒定的向下载荷。该仿真包含了轴接触,但确定轴接触是最不关键的情况,因此在后续的仿真中忽略了该接触。
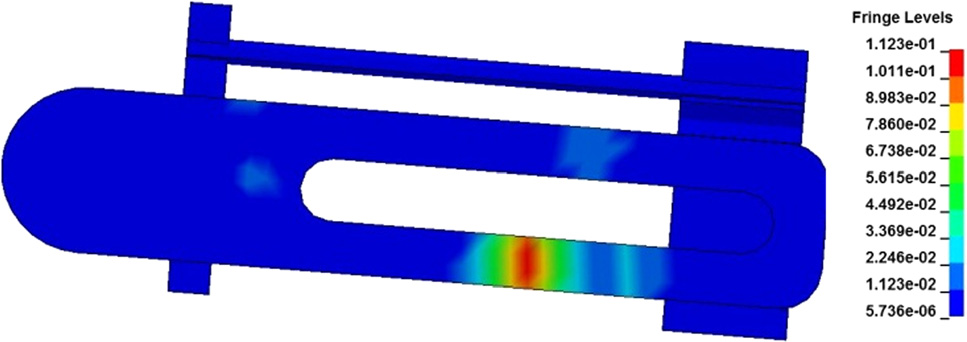
杠杆臂上的载荷引起了振动,且应力随时间的变化并不平滑。在此仿真中观察到的整体载荷较低。旋转的带支架杠杆臂中的最大应力为 16.244 千磅每平方英寸,出现在曲柄侧面,位于轴连接支架上方、远离螺钉的一侧。此时杠杆臂几乎呈垂直状态,微小的倾斜角度导致弯矩集中在曲柄侧面。然而,该应力低于带支架杠杆臂设计在静态载荷下观察到的应力。接触应力也显著降低。旋转杠杆臂的最大应力状态如图7所示。
7 讨论和最终设计
仿真测得螺钉靠近轴连接支架连接处存在高弯曲应力。正如之前计算的那样,螺钉在轴向载荷作用下会承受显著的应力。由于仿真中未对螺钉接触进行建模,因此在没有物理测试的情况下,很难充分评估该位置螺钉的实际应力。然而,螺钉在最大应力处的受力发生在螺钉受到横向加载时。在横向加载下,螺钉承受弯曲应力且不承受轴向载荷。螺钉在一个循环中的最大应力不应超过 17.8 kpsi,这是横向加载仿真中观察到的最大需应力。
需要注意的是,仿真将螺钉与轴连接支架之间的连接视为固定的悬臂梁。在连接处无法旋转、弯曲或压缩。虽然这并不能完全模拟实际连接情况,但它提供了该位置螺钉所受应力的保守估计。认为在横向加载过程中螺钉实际承受的应力明显小于仿真中观察到的应力。
因此,仿真结果表明,如果使用冷轧钢或其他最小屈服强度为 60 kpsi 的高强度钢制造,该设计是可接受的。螺钉若采用最小屈服强度为 45 kpsi 的冷拉 1018 钢制造,则亦可接受。
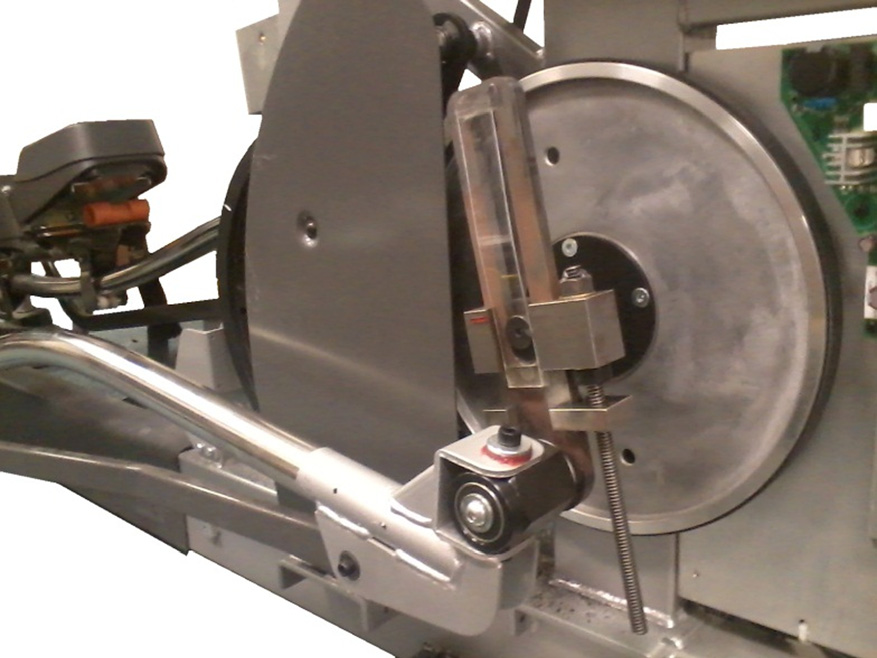
安装在 ICARE 系统上的最终设计如图8所示。该设计已通过高达 90 公斤受试者的广泛成功的测试。
8 结论
先前的研究表明,当儿童步态根据身体尺寸进行归一化时,其与成人步态非常相似。在 ICARE 系统对成人成功完成临床测试后,研究人员决定修改该设备,以帮助儿科患者进行步态康复。
由于 ICARE 是一种通过带动患者脚部沿类似步态的轨迹运动来康复患者的治疗设备,因此现有 ICARE 系统与儿童 ICARE 之间的一个主要差异体现在步长和步高上。通过修改 ICARE 曲柄机构,研究人员能够同时减小步长和步高,并且使用改进后的曲柄时,脚踏板的归一化路径与成人 ICARE 的路径几乎完全相同。
新型曲柄机构由三部分组成:曲柄、螺杆和衬套以及移动轴连接支架。螺杆将曲柄连接到支架上,并设定轴与曲柄和连杆之间的旋转关节之间的距离。通过改变此距离,该曲柄机构能够将步长从 18.5 英寸显著减小至 7.5 英寸,以适应儿童使用。
仿真结果表明,如果使用冷轧钢,新设计中的最大应力在可接受范围内。
9 未来工作
儿童 ICARE 曲柄机构经过一千多个循环的严苛载荷测试。测试后,杠杆臂上未发现任何损坏。进一步的测试将确定儿童 ICARE 曲柄机构对疲劳载荷的承受能力。

















 1050
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









