









 文章提供了关于如何处理和使用ROS中的点云数据的步骤,特别是涉及将CustomMsg格式的雷达数据转换为pointcloud2格式。同时,详细介绍了patchwork++的安装过程,包括解决CMake警告的方法和处理依赖缺失的问题。在成功安装后,文章还指导如何使用rviz进行界面设置和数据展示。
文章提供了关于如何处理和使用ROS中的点云数据的步骤,特别是涉及将CustomMsg格式的雷达数据转换为pointcloud2格式。同时,详细介绍了patchwork++的安装过程,包括解决CMake警告的方法和处理依赖缺失的问题。在成功安装后,文章还指导如何使用rviz进行界面设置和数据展示。
食用指示:
红色:注意
绿色:备注(功能)
蓝色:参数
目录
先给测试步骤(大概先扫一眼)
具体安装步骤(按照这个安装)
1.按顺序来
2.深呼吸
3.出错是正常的
Rvis界面设置(到这儿就已经成功了,恭喜!)
先给测试步骤
注意:我的数据是已经处理过的,格式为 pointcloud2 的 .bag 包。
一般雷达直接录出来的格式是CustomMsg,若要patchwork++跑的通,需要先转换录好的点云数据。 转换要安装 livox_to_pointcloud2 包;
所以我测试的步骤如下:
1.主目录下开启一个终端输入下面代码
roscore2.再去工作空间里的,数据包同目录下开一个终端
rosbag play <你的包名.bag> -l比如
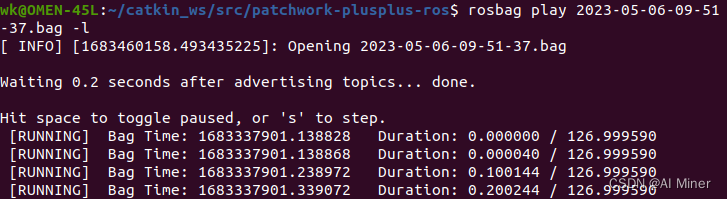
而且要注意后面要加 “-l ” ,加 “ 杠 爱楼 ” 数据才会一直放。不然放完就完了。
3.最后再去工作空间下开启一个终端
source devel/setup.sh
roslaunch patchworkpp demo.launch
测试结束。
------------------分割线--------------
具体安装步骤
网址:GitHub - url-kaist/patchwork-plusplus-ros: ROS Implementation of Patchwork++
根据readme的操作来进行(下面是部分网站截图)

第一步是建立工作空间 catkin_ws,并在catkin_ws下创建src文件夹
$ mkdir -p ~/catkin_ws/src
然后进入工作空间catkin_ws
$ cd ~/catkin_ws
接下来catkin_make(我建议用catkin_make,没啥区别)
$ catkin build # or catkin_make我的 catkin build 报错

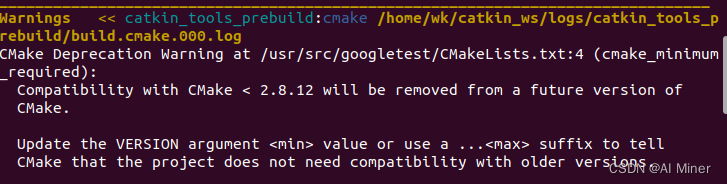
这是一个 CMake 的警告,提示某些选项在未来的版本中可能会被移除。警告信息指出要更新 CMake 版本或以特定的方式声明项目不需要与旧版本兼容。
解决方案是将 cmake_minimum_required 命令的参数值更新为 2.8.12 或更高版本,并使用 VERSION 参数明确指定所需的最低 CMake 版本。例如,可以在 CMakeLists.txt 文件中添加以下代码:
cmake_minimum_required(VERSION 3.0)
这将指定项目需要至少使用 CMake 3.0 版本。如果您的项目不需要与旧版本的 CMake 兼容,则可以在版本号后面添加 ... 后缀,如下所示:
cmake_minimum_required(VERSION 3.0...)
这将告诉 CMake,项目不需要与旧版本兼容,即使将来的版本移除了与旧版本的兼容性也不会有问题。
这个问题比较容易解决,在 CMakeLists.txt 文件中 修改 版本号就好了。
接下来可能还会出现报错,比如 “缺少依赖”。
解决方法:缺什么就安装什么(我的情况是缺少ros-noetic-jsk-rviz-plugins)

建立工作空间,然后在工作空间里catkin_make。(catkin_make会生成build devel log 文件夹)
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws
$ catkin build # or catkin_make然后要把下载下来的patchwork++工程包安装到catkin_ws的src目录下
cd ~/catkin_ws/src 
git clone GitHub - url-kaist/patchwork-plusplus-ros: ROS Implementation of Patchwork++ 
然后要在工程目录catkin_ws里的src下,也就是和这个patchwork-plusplus-ros同目录下,创建一个Cmakelist文件(Cmakelist文件里面包含工作空间需要的配置),命令如下。
(在工程目录里的src下面,与ros包同目录的Cmakelist文件一般要手动创建;ros包里面的Cmakelist文件一般都是自带的)

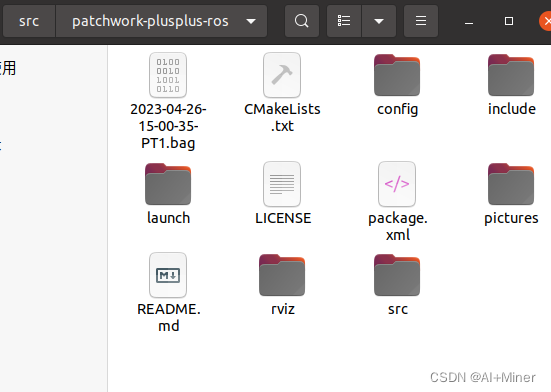
然后数据包要拷贝到ros文件下(即在patchwork-plusplus-ros下拷贝数据包)数据包是 .bag 文件
为了运行ros环境要 roscore ,在哪打开终端都行
roscore接下来去rosbag play 包
rosbag play 数据包名 是用来把数据包里的数据发布出来的,相当于发布一个topic
然后要source devel,是为了给ros工作空间环境,否则roslaunch就找不到结点信息,一次就够了。原因是 source会设置 ROS 工作空间的环境变量,以便可以使用 ROS 软件包和工具。一旦执行了 source devel/setup.bash,就可以在当前终端窗口中使用 ROS 命令和工具,例如 roscd、rosrun 和 roslaunch。尤其注意 source devel 语句要在 工作空间下执行。
source devel/setup.bash最后roslaunch 就行了(一般要先修改些东西否则会报错)
roslaunch patchworkpp demo.launch roslaunch patchworkpp demo.launch 是开始运行demo程序 (这步执行之后,可视化界面rviz会出来)
如果中间出现错误去修改源代码的话,请注意,但凡动了源代码就要重新编译——在工作空间目录下打开一个终端
catkin_make然后再去rosbag play 包 ,然后再去执行source devel 语句,再去roslaunch。
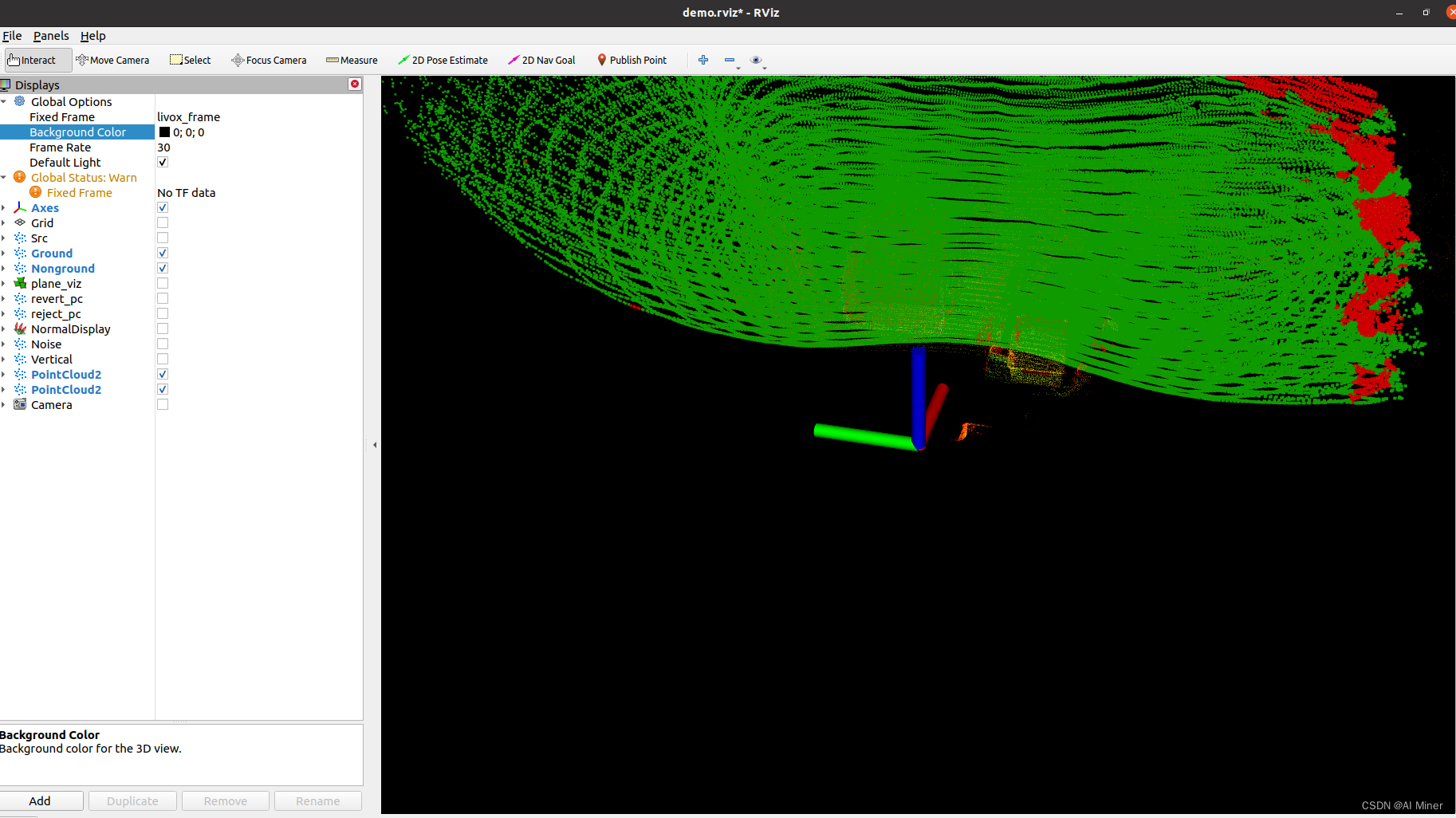
Rvis界面设置
需要把原来的frame改掉,把map改成livox_frame。
点击进入下面的add里,把摄像头camera数据窗口打开,即可看到真实场景。
在add的By topic 里再把livox的雷达数据pointcloud2点云选上,可看到点云。


















 2923
2923

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











