







ROS服务中自定义数据类型
在上一篇文章中,描述了一种两层封装的点集传输服务消息类型,比较复杂。上一篇文章
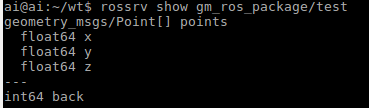
事后我就在想何必包两层,直接在服务中利用提供的数据类型定义数组不就行了。所以动手试了一下:
自定义数据类型
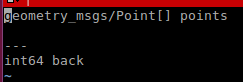
代码应用
//server端
#include "ros/ros.h"
#include "gm_ros_package/objectPosition.h"
#include "gm_ros_package/test.h"
bool process_position(gm_ros_package::test::Request &req,gm_ros_package::test::Response &res)
{
// ROS_INFO("x:%f,y:%f,z:%f",req.points.point[0].x,req.points.point[0].y,req.points.point[0].z);
for(int i =0;i < 2;i ++)
{
ROS_INFO("x:%f,y:%f,z:%f",req.points 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1283
1283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









