







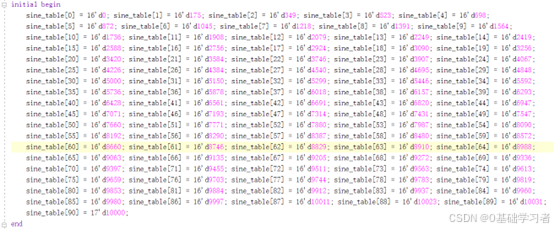
首先需要创建一个正弦函数的查找表。我们只需要考虑0到90度的范围,因为正弦函数具有对称性,其他角度的值可以通过简单的数学变换获得。输出的正弦值和余弦值放大了10000倍,这样可以在不失太多精度的情况下,使用整数运算。
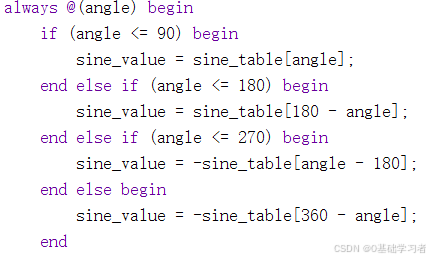
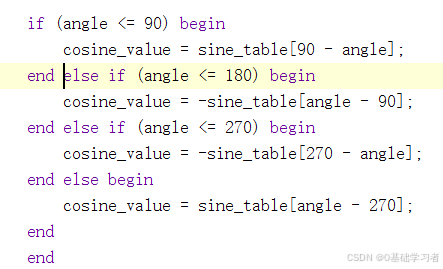
下图是计算正弦和余弦值的关键代码。
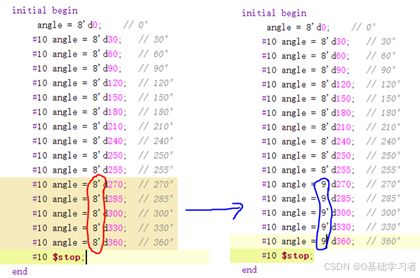
下图是我经过仿真验证的波形。但是有一个很奇怪的事情就是按照这个时序仿真图来说输入的角度和输出的结果的值与理论值相比是一致的。但是在我的testbench中,如果测试的是一个大于270度的值,在测试的波形中不会出现我设置的角度,而是会随机出现一个数值,并且这个随机出现的数值和它的输出结果还是正确的。

经过仔细调试我的代码,解决了上述的问题。我一开始认为我的代码是没问题的,但是经过我多次利用testbench调试,我发现我的输入信号最多只能算到255度,原来是在进行设计的过程中,我的输入信号的位数出现了问题,0到359度的位数应该是9位,(即[8:0]),但我一开始设置成了8位所以导致的错误。
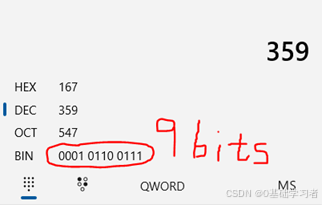
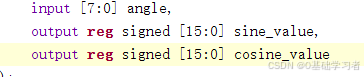
在仿真验证的时候也要对位数进行修改:
位数正确的仿真验证结果:

仿真结果与理论相符。
以下是设计代码:
module trig_lookup(
input [8:0] angle, // 输入角度,范围0-359
output reg signed [15:0] sine_value, // 输出正弦值,放大10000倍,有符号
output reg signed [15:0] cosine_value // 输出余弦值,放大10000倍
);
reg [15:0] sine_table[0:90];
initial begin
sine_table[0] = 16'd0; sine_table[1] = 16'd175; sine_table[2] = 16'd349; sine_table[3] = 16'd523; sine_table[4] = 16'd698;
sine_table[5] = 16'd872; sine_table[6] = 16'd1045; sine_table[7] = 16'd1218; sine_table[8] = 16'd1391; sine_table[9] = 16'd1564;
sine_table[10] = 16'd1736; sine_table[11] = 16'd1908; sine_table[12] = 16'd2079; sine_table[13] = 16'd2249; sine_table[14] = 16'd2419;
sine_table[15] = 16'd2588; sine_table[16] = 16'd2756; sine_table[17] = 16'd2924; sine_table[18] = 16'd3090; sine_table[19] = 16'd3256;
sine_table[20] = 16'd3420; sine_table[21] = 16'd3584; sine_table[22] = 16'd3746; sine_table[23] = 16'd3907; sine_table[24] = 16'd4067;
sine_table[25] = 16'd4226; sine_table[26] = 16'd4384; sine_table[27] = 16'd4540; sine_table[28] = 16'd4695; sine_table[29] = 16'd4848;
sine_table[30] = 16'd5000; sine_table[31] = 16'd5150; sine_table[32] = 16'd5299; sine_table[33] = 16'd5446; sine_table[34] = 16'd5592;
sine_table[35] = 16'd5736; sine_table[36] = 16'd5878; sine_table[37] = 16'd6018; sine_table[38] = 16'd6157; sine_table[39] = 16'd6293;
sine_table[40] = 16'd6428; sine_table[41] = 16'd6561; sine_table[42] = 16'd6691; sine_table[43] = 16'd6820; sine_table[44] = 16'd6947;
sine_table[45] = 16'd7071; sine_table[46] = 16'd7193; sine_table[47] = 16'd7314; sine_table[48] = 16'd7431; sine_table[49] = 16'd7547;
sine_table[50] = 16'd7660; sine_table[51] = 16'd7771; sine_table[52] = 16'd7880; sine_table[53] = 16'd7987; sine_table[54] = 16'd8090;
sine_table[55] = 16'd8192; sine_table[56] = 16'd8290; sine_table[57] = 16'd8387; sine_table[58] = 16'd8480; sine_table[59] = 16'd8572;
sine_table[60] = 16'd8660; sine_table[61] = 16'd8746; sine_table[62] = 16'd8829; sine_table[63] = 16'd8910; sine_table[64] = 16'd8988;
sine_table[65] = 16'd9063; sine_table[66] = 16'd9135; sine_table[67] = 16'd9205; sine_table[68] = 16'd9272; sine_table[69] = 16'd9336;
sine_table[70] = 16'd9397; sine_table[71] = 16'd9455; sine_table[72] = 16'd9511; sine_table[73] = 16'd9563; sine_table[74] = 16'd9613;
sine_table[75] = 16'd9659; sine_table[76] = 16'd9703; sine_table[77] = 16'd9744; sine_table[78] = 16'd9783; sine_table[79] = 16'd9819;
sine_table[80] = 16'd9853; sine_table[81] = 16'd9884; sine_table[82] = 16'd9912; sine_table[83] = 16'd9937; sine_table[84] = 16'd9960;
sine_table[85] = 16'd9980; sine_table[86] = 16'd9997; sine_table[87] = 16'd10011; sine_table[88] = 16'd10023; sine_table[89] = 16'd10031;
sine_table[90] = 17'd10000;
end
always @(angle) begin
if (angle <= 90) begin
sine_value = sine_table[angle];
end else if (angle <= 180) begin
sine_value = sine_table[180 - angle];
end else if (angle <= 270) begin
sine_value = -sine_table[angle - 180];
end else begin
sine_value = -sine_table[360 - angle];
end
if (angle <= 90) begin
cosine_value = sine_table[90 - angle];
end else if (angle <= 180) begin
cosine_value = -sine_table[angle - 90];
end else if (angle <= 270) begin
cosine_value = -sine_table[270 - angle];
end else begin
cosine_value = sine_table[angle - 270];
end
end
endmodule以下是仿真验证代码:
module trig_lookup_tb();
reg [8:0] angle; // 测试输入角度
wire [15:0] sine_value; // 正弦输出
wire [15:0] cosine_value; // 余弦输出
trig_lookup uut (
.angle(angle),
.sine_value(sine_value),
.cosine_value(cosine_value)
);
initial begin
angle = 8'd0; // 0°
#10 angle = 8'd30; // 30°
#10 angle = 8'd60; // 60°
#10 angle = 8'd90; // 90°
#10 angle = 8'd120; // 120°
#10 angle = 8'd150; // 150°
#10 angle = 8'd180; // 180°
#10 angle = 8'd210; // 210°
#10 angle = 8'd240; // 240°
#10 angle = 8'd250; // 250°
#10 angle = 8'd255; // 255°
#10 angle = 9'd270; // 270°
#10 angle = 9'd285; // 285°
#10 angle = 9'd300; // 300°
#10 angle = 9'd330; // 330°
#10 angle = 9'd360; // 360°
#10 $stop;
end
endmodule

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









