






 本文介绍了在Ubuntu18.04.6LTS系统上安装CUDA10.0、PyTorch1.2以及处理版本匹配、错误解决(如ImportError和cmake问题)的过程,包括CUDA下载、环境变量设置、Python包安装等。
本文介绍了在Ubuntu18.04.6LTS系统上安装CUDA10.0、PyTorch1.2以及处理版本匹配、错误解决(如ImportError和cmake问题)的过程,包括CUDA下载、环境变量设置、Python包安装等。
ubuntu 18.04.6LTS+cuda10.0+pytorch 1.2
系统下载:Jetson Download Center Archive | NVIDIA 开发者
一定要注意版本匹配
直观的版本对应信息(参考该博主)
查看匹配版本信息:
pytorch官网
https://pytorch.org/get-started/previous-versions/#v210
由于我使用的是Jeston nano英伟达的板子,相应的版本下载要对应嵌入式版本(aarch_64)
比如下载的torch-1.2.0-cp36-cp36m-linux_aarch64.whl,其中,0.4.0表示torch版本号,cp36-cp36m表示该软件包是为python3.6(cp36)编译的,并且与CPython3.6兼容,linux_aarch64表示该软件包是为ARM64架构的Linux设计的。
cuda 安装流程
英伟达官网下载自己适合的版本
CUDA Toolkit 10.0 Download | NVIDIA Developer
安装命令:
sudo sh 下载的文件名
获取torch版本路径:
https://download.pytorch.org/whl/torch/
PyTorch for Jetson - Jetson Nano - NVIDIA Developer Forums
错误:
ImportError: libopenblas.so.0: cannot open shared object file: No such file or directory
原因:sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
torchvison
命令行:
sudo pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple torchvision==0.2.0
当所下载的版本信息没有符合需要的版本(如本人需要0.4.0,没有找到适合arm64架构的软件包,所以为了适配版本信息,下载了一个较低的版本0.2.0)
opencv下载
其他信息
anaconda的下载官网
https://www.anaconda.com/download#downloads
报错参考该博主(挺详细,留下来自用喽!)
ubuntu常见报错&&解决方法(二)_process has finished cleanly-优快云博客
cmake错误:
该问题是cmake过程中出现依赖包没有安装:sudo apt-get install ros-ros版本-文件名 (文件名注意有"_"全部换成“-”,如果没更换,会出现无法定位软件包报错)
E:无法定位软件包,操作:sudo apt-get install qtbase5-dev
Ubuntu软件更新器无法进行更新:
1)更换镜像源
2)更改DNS服务:sudo gedit /etc/resolv.conf(更改nameserver 8.8.8.8 nameserver8.8.4.4)
ROS一键安装参考:ROS的最简单安装——鱼香一键安装_鱼香ros一键安装-优快云博客
Jeston nano调用CSI摄像头报错:(error.produced for bootloader(-configure)时出错。在处理时有错误发生nvidia-l4t-bootloader)参考:error汇总:dpkg: error processing package *** (--configure)_installed nvidia-l4t-bootloader package post-insta-优快云博客
终端报错:erroe:generared. /dvs/git/dirty/git-master_linux.....
解决办法(如果用完下面的解决办法还会报错,尝试将IMX219插入另一个插孔):Error generated. /dvs/git/dirty/git-master_linux/multimedia/nvgstreamer/gst-nvarguscamera/gstnvargus-优快云博客
jeston naono配置IMX219摄像头:
参考:imx219-83 ros使用_imx219驱动-优快云博客
我配置的是单个摄像头;
roslaunch完文件启动终端可视化界面:rosrun rqt_image_view rqt_image_view
jeston nano中创建功能包出错:catkin_make
解决办法(修改/usr/local/bin/catkin_find_pkg文件中python3改成python2catkin_make时提示from catkin_pkg.cli.find_pkg import main No module named 'catkin_pkg'_cmake error at cmakelists.txt:22 (message): search-优快云博客
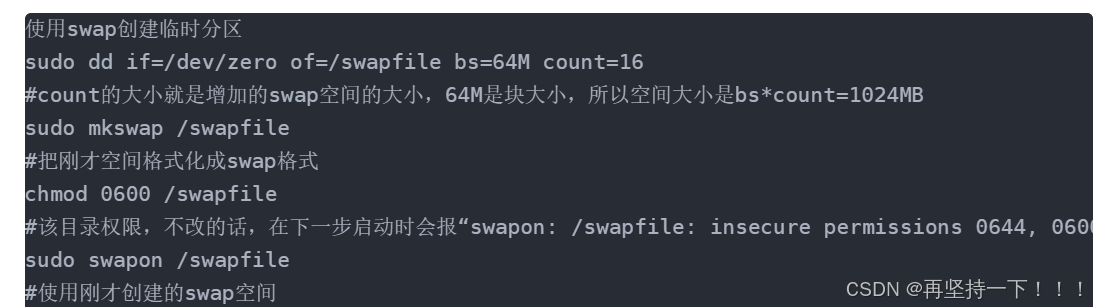
jeston nano编译kalibr报错c++:internal complier error:(已杀死)please submit a full bug report,with preprocessed source if appropriate.原因:内存不足
参考1:catkin_make常见错误之internal compiler error_c++: internal compiler error: killed (program cc1p-优快云博客
参考:ubuntu (乌班图)g++: internal compiler error: Killed (program cc1plus) 解决办法_g++ 内存交换空间不足-优快云博客


















 2066
2066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









