







一、前述
emmm,cv2这个库,也就是opencv折腾了10分钟(Could not load the Qt platform plugin xcb in巴拉巴拉),果断放弃;换了python自带的库进行读取;理论部分还是参考了《视觉slam十四讲》中第五讲的内容
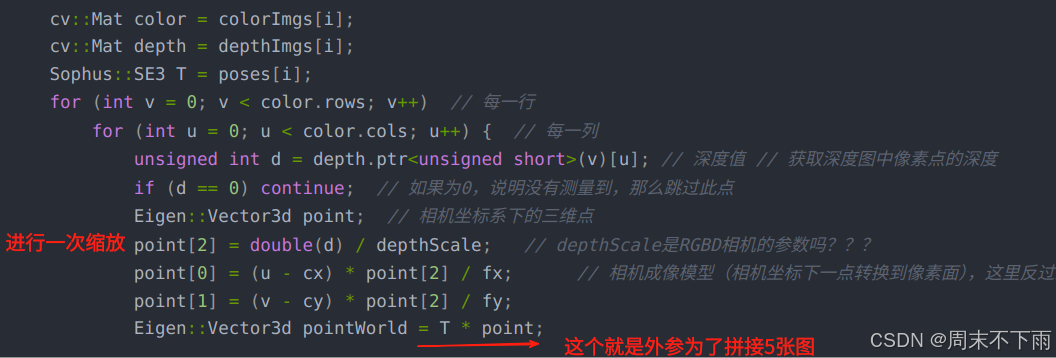
核心的话,其实就是这块,逐像素赋值
二、代码展示
提要:这里用的输入例子还是第五讲中的RGB-D实践那块,我选取了第一张rgb和深度图进行反投影至点云,pose里面的内容我没去用(因为都是位姿,是给拼接用的),然后cx = 325.5、cy = 253.5、fx = 518.0、fy = 519.0、depth_scale = 1000.0。这几个参数,我是直接抄下来了。
import numpy 
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 6750
6750

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











