







引言
在unity2022中,AI Navigation迎来了一次大更新,但是我们依然可以使用旧版的寻路系统(Navigation (Obsolete))
在unity2022中使用旧版的系统
但是在最新的unity6中,该选项被移除了,这迫使我们不得不使用其新版的系统
 unity6中已经移除了该选项
unity6中已经移除了该选项
正片开始
烘焙
在旧版AI Navigation中,烘焙集成在Windows->AI->Navigation中(Unity2022为Windows->AI->Navigation (Obsolete))
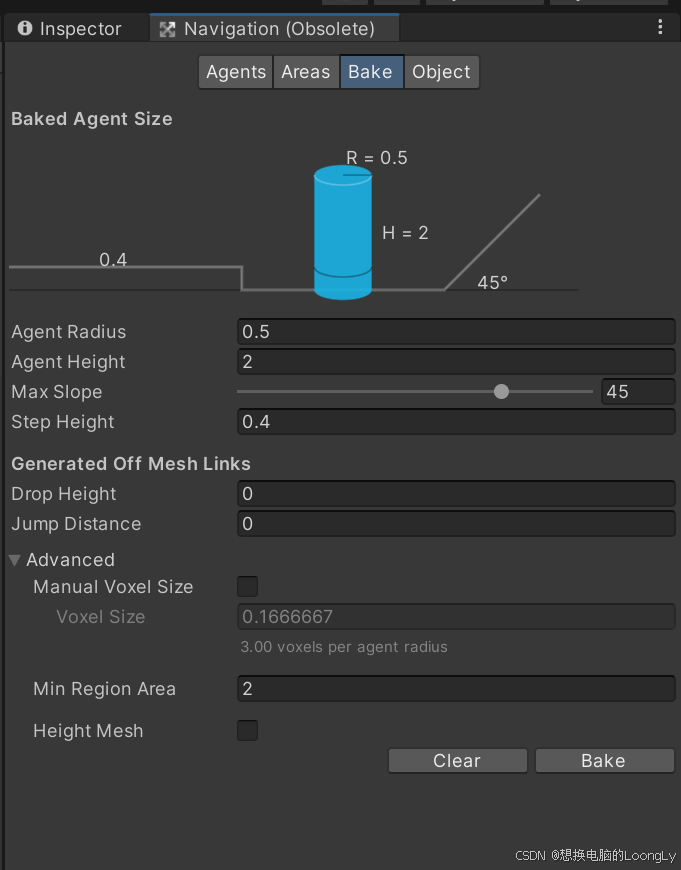
旧版烘焙界面
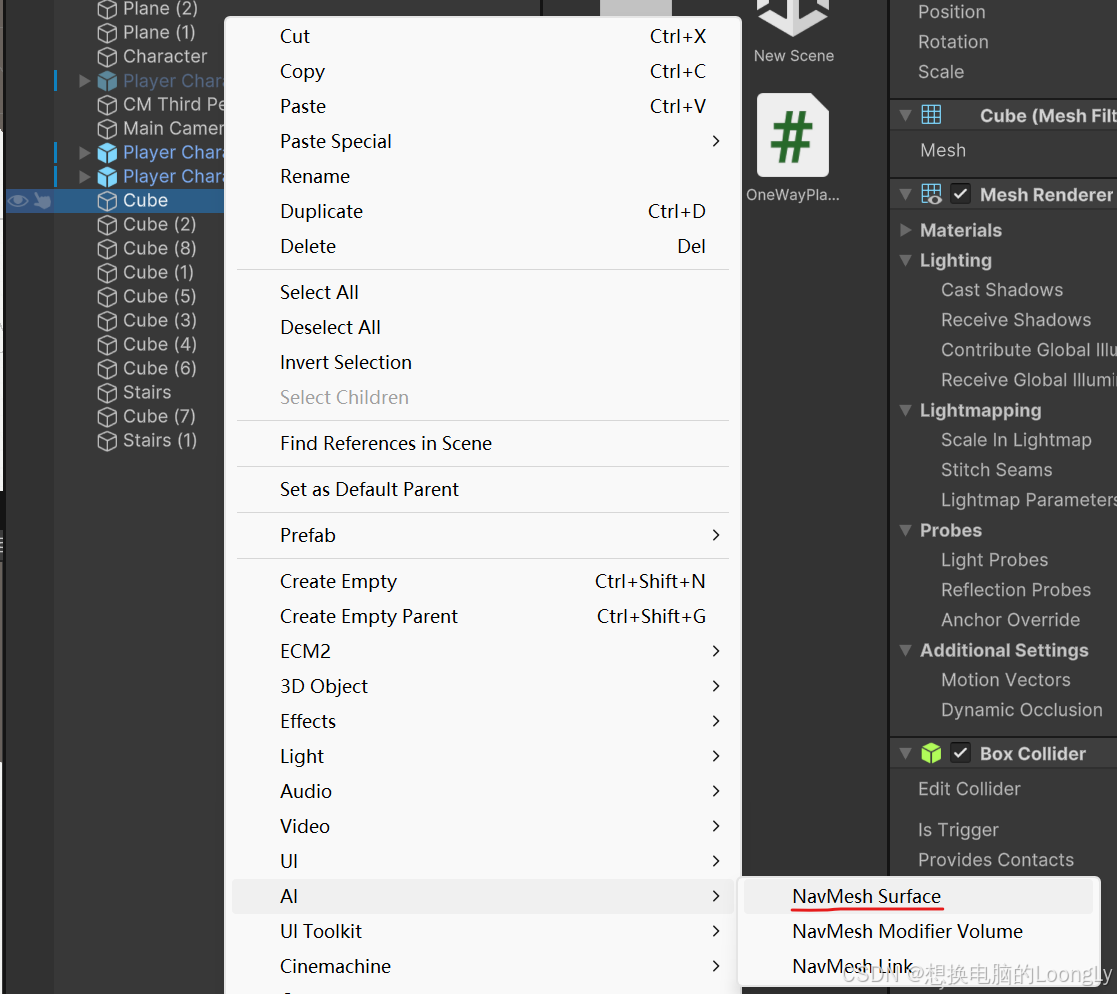
而在新版系统中
我们需要在场景的物体(任意一个物体)下,右键创建NavMesh Surface物体
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3810
3810

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











