







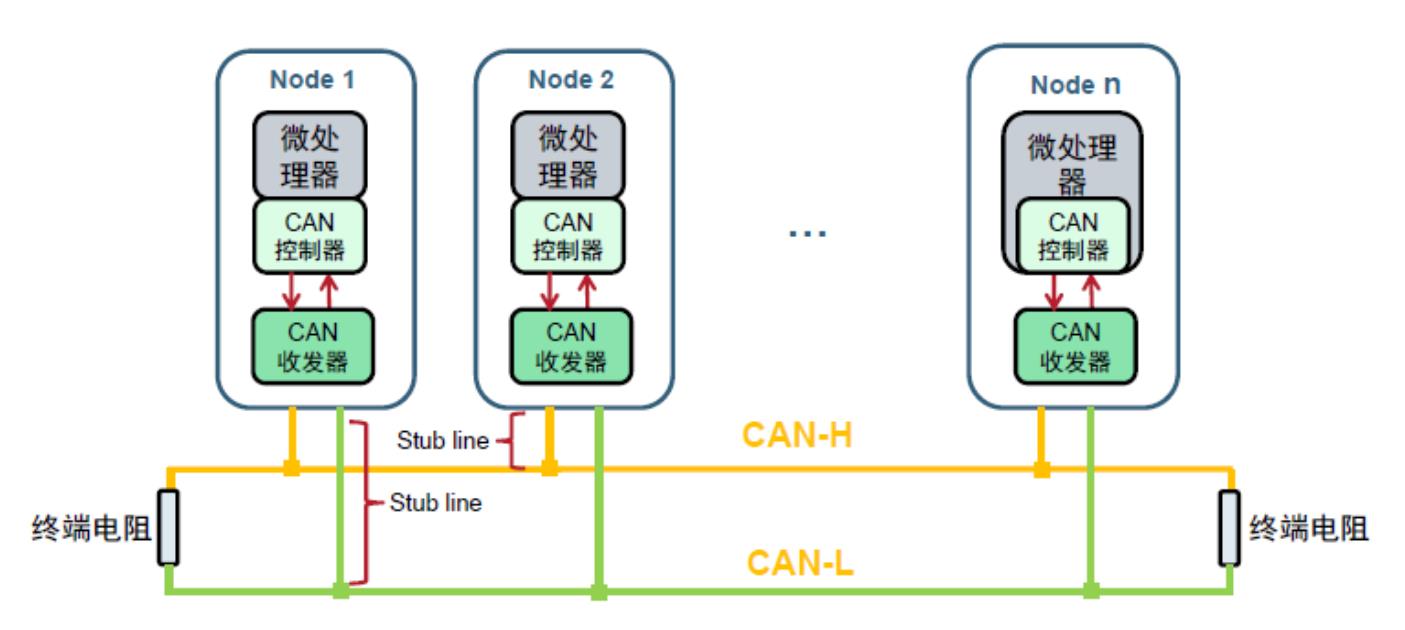
本文旨在介绍CAN通信电机布线的常见问题、注意事项以及标准规范,以确保通信系统的稳定性和可靠性。CAN(Controller Area Network)总线作为一种多主从结构的串行通信总线,被广泛应用于工业自动化领域。在电机控制系统中,合理的布线设计对于保证通信质量至关重要。

直接使用三通线:当总线上连接多台电机时,建议使用专门的三通线进行连接。这有助于减少总线分支,降低布线复杂度,从而提高通信稳定性。
一、总线分支过长的问题
现象描述:
CAN总线的布线受现场环境、产品形状等因素的影响,可能导致总线分支过长或过多。在某系统中,若将某节点的支线延长,可能会导致其他节点无法正常工作,系统报错。
问题原因:
台阶现象:当总线支线过长时,上升沿和下降沿会产生台阶现象。当台阶正好处于逻辑识别阈值附近时,容易导致位宽度失调,从而使接收节点接收错误。
阻抗匹配问题:支线过长会直接导致总线阻抗匹配问题发生。阻抗匹配是为了调整负载功率和抑制信号反射,一旦出现问题,就会出现信号失真。
二、分支与主干的长度原则
1.高速CAN规范:
根据ISO11898-1/2标准,高速CAN(波特率为1Mbps)的分支长度最长不应超过0.3米。
2.应用厂商自定义原则:
对于其他波特率,最长分支长度一般由应用厂商自定义。但总体上应遵循以下原则:
分支长度总和+主干长度应小于总线传输极限长度的70%。
分支总和一般不超过总长度的30%。
3.理想情况下的长度原则:
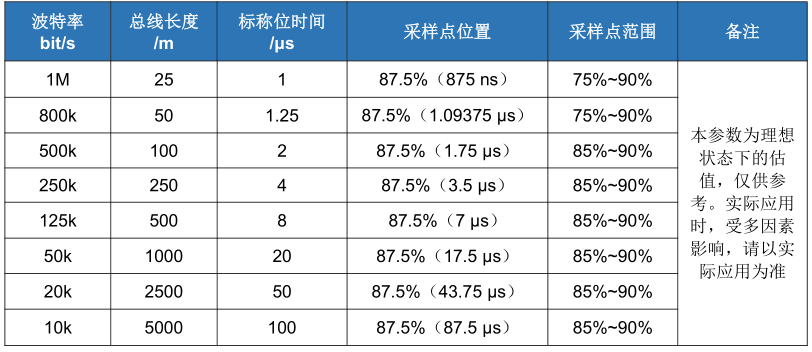
图3.1给出了某电机在理想情况下不同波特率对应的长度原则。在实际应用中,应结合具体产品和环境进行适当调整。
结论
CAN通信电机的布线设计是确保通信系统稳定性和可靠性的关键。在布线过程中,应注意避免总线分支过长,合理使用三通线,并遵循ISO11898-1/2标准及应用厂商自定义的长度原则。通过合理的布线设计,可以提高通信质量,降低系统故障率,从而保障电机控制系统的正常运行。
以上即是今天分享的全部内容,如果有任何问题,请及时联系我们。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









