






前言
最近调试ROS代码,发现程序有时候会出现崩溃的问题,但是ros又不会把具体的错误输出,因此调试很麻烦,通过在网上查询记录自己DEBUG的过程
准备工作
1启用 core dump
默认情况下,系统可能禁止了 core dump,检查并启用:
ulimit -c unlimited
然后在启动 ROS 节点前,确保 core dump 允许生成:
echo "/tmp/core.%e.%p" | sudo tee /proc/sys/kernel/core_pattern调试
当运行程序,节点发生崩溃后,可以在/tmp 文件下找到对应的core 文件,然后运行gdb
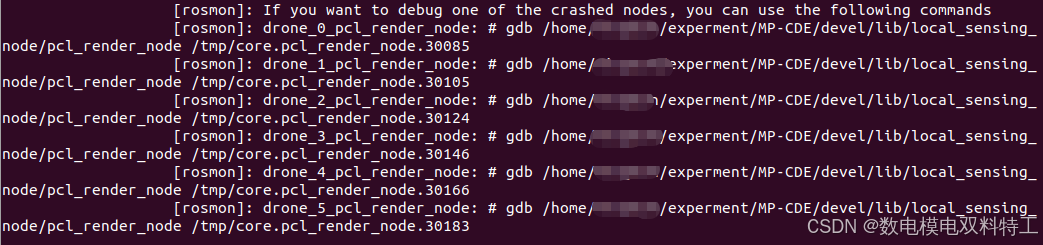
gdb /path/to/executable /tmp/core.drone_1_target_ekf_node.<PID>
bt # 查看堆栈回溯
这样就可以定位到发生错误的地方

















 2123
2123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









