




 本文详细指导如何在已经安装VMware和Officelite的环境中配置KUKARouter,包括设置IP地址、端口,以及在虚拟机和外部主机上同步网络配置,最后进行通讯测试。
本文详细指导如何在已经安装VMware和Officelite的环境中配置KUKARouter,包括设置IP地址、端口,以及在虚拟机和外部主机上同步网络配置,最后进行通讯测试。
前提条件:
- 已安装VMWare软件,并可以打开Officelite虚拟机
- 虚拟机中安装好ethernetKRL
- 已安装KUKA Router软件包
1. 在虚拟机中配置KUKA Router
打开Router.exe软件,
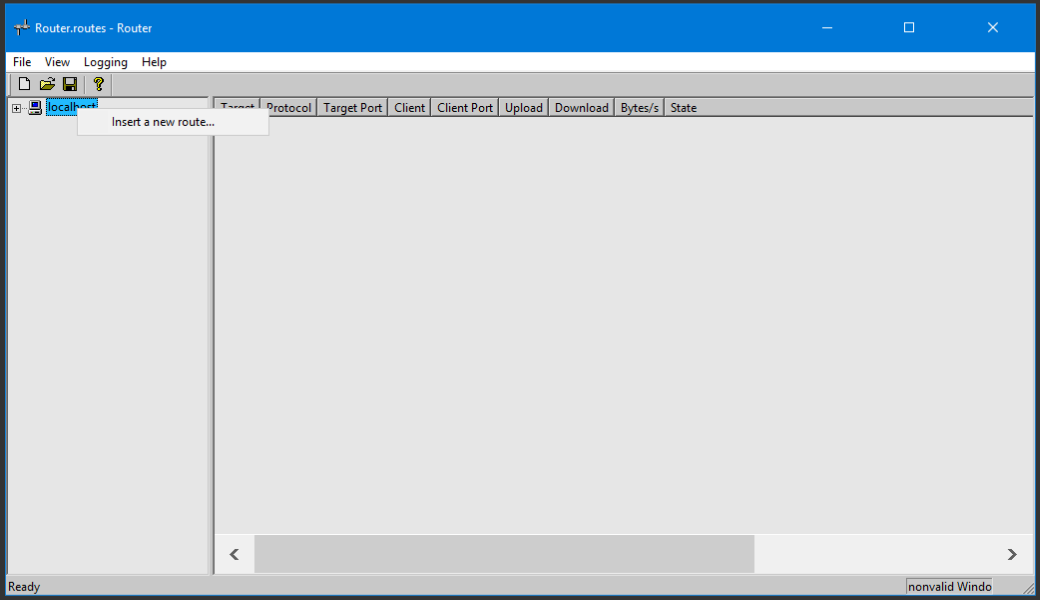
右键点击localhost树形图标,新建一个Router,
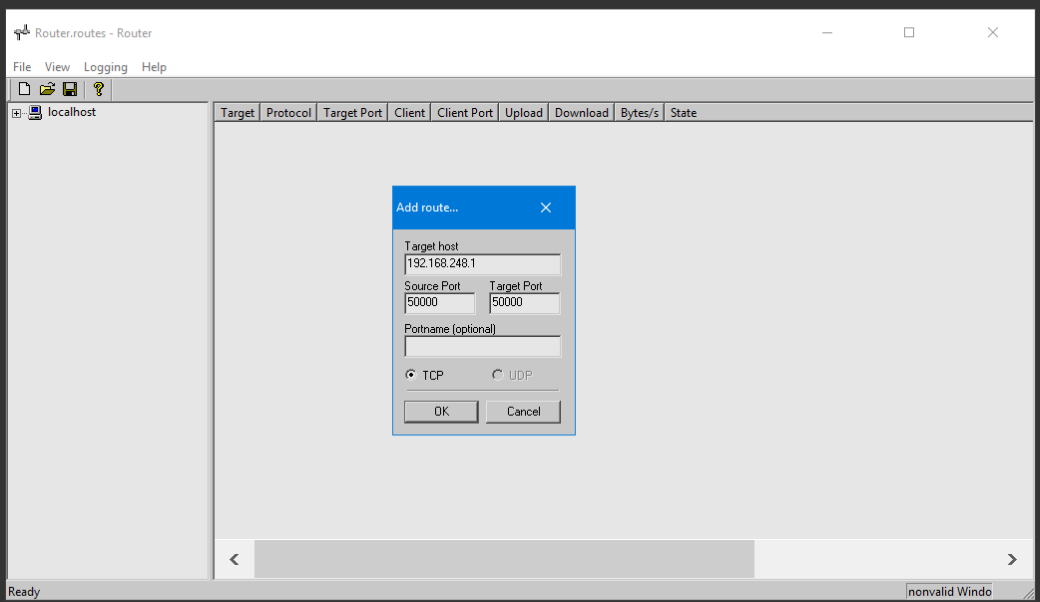
设置IP地址和端口号如下,并点击OK确认
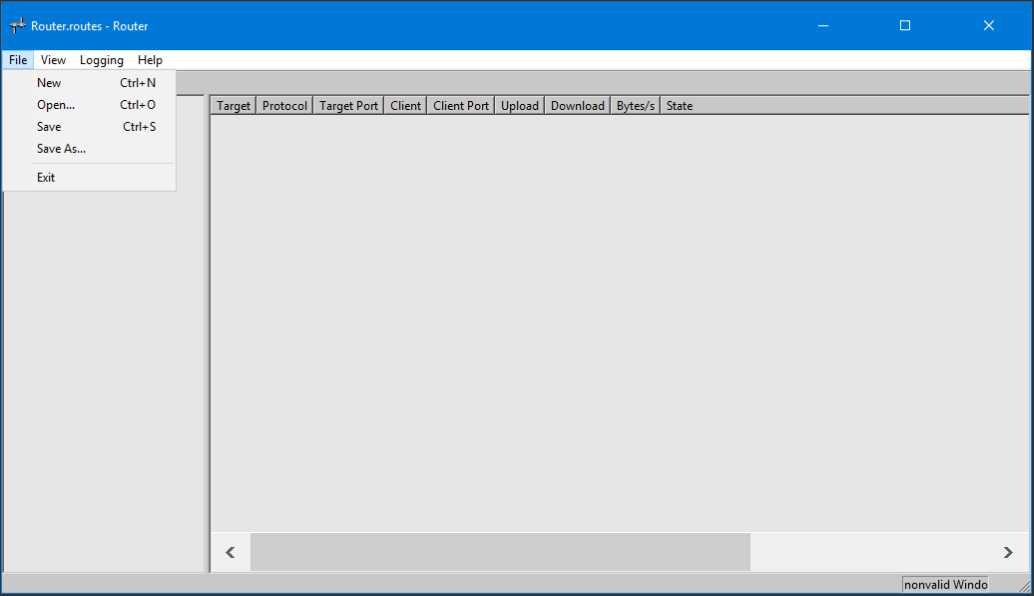
确认后点击文件并保存文件。
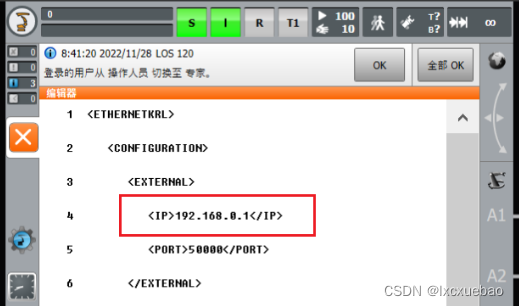
2. 虚拟示教器中修改EthernetKRL通讯文件
切换至专家模式后,修改文件XML中的IP地址为:192.168.0.1,修改完成后重启系统。
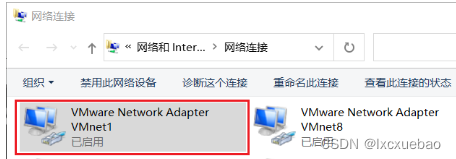
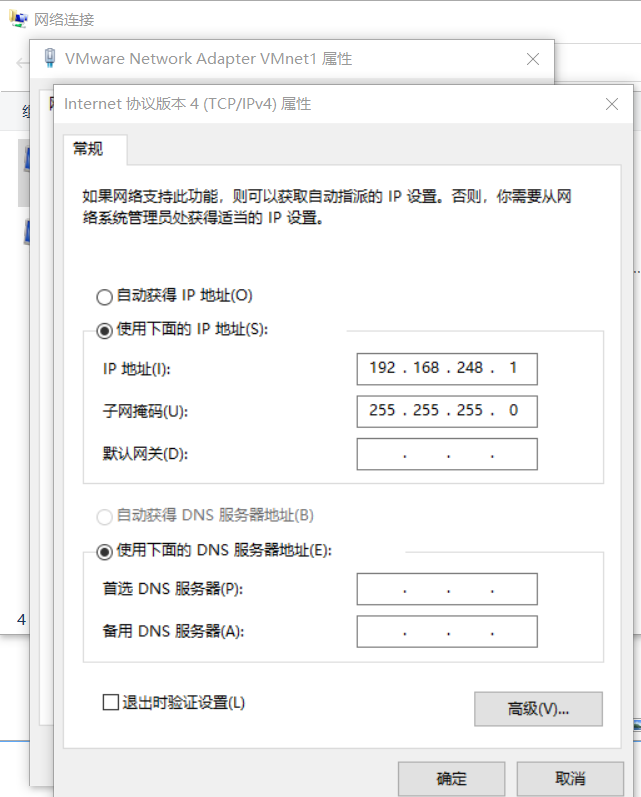
3. 修改外部主机的适配器VMware Network Adapter VMnet1的IP地址
设置适配器的IP地址如下,与在KUKA Router建立的主机IP地址信息保持一致。


















 1777
1777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











