 Halcon:3D点云与MESH转换教程
Halcon:3D点云与MESH转换教程








 超级会员免费看
超级会员免费看
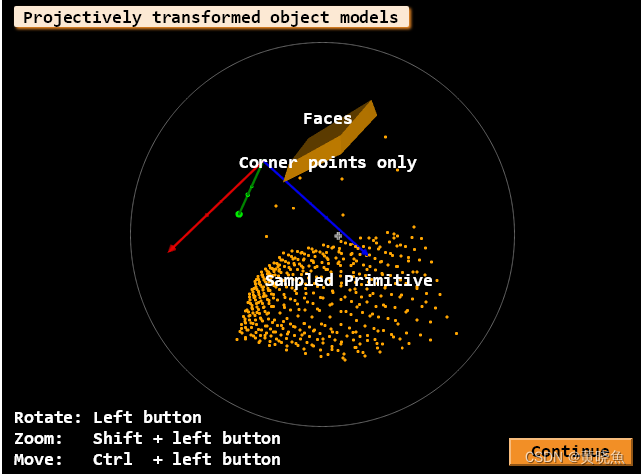
 本文详细介绍了如何在Halcon中进行3D点云和MESH网格之间的转换,通过实例展示了从MESH到点云以及点云回转到MESH的过程,利用projective_trans_object_model_3d操作员进行变换处理。
本文详细介绍了如何在Halcon中进行3D点云和MESH网格之间的转换,通过实例展示了从MESH到点云以及点云回转到MESH的过程,利用projective_trans_object_model_3d操作员进行变换处理。
1.实现效果
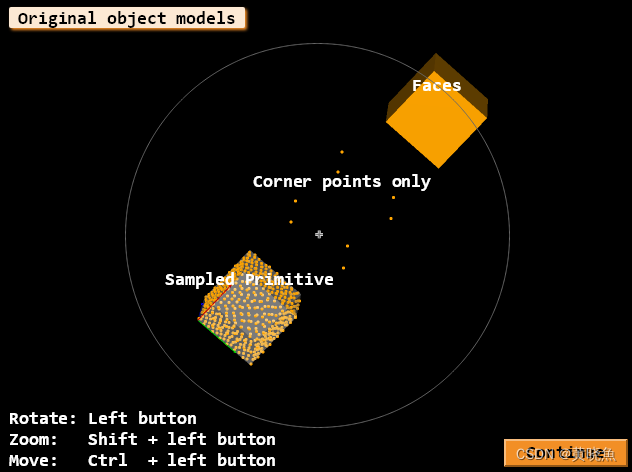
这个案例主要是想告诉我们,如何在点云数据(全是点)和MESH(网格数据)中转换,理论上说可以点云数据可以看作的离散的,而MESH网格数据可以看作是连续的。
上图展示了三个(其实是四个)空间中的3d对象,左边第一个是一个立方体,经过降采样之后的点云,中间的是立方体四个角点的点云,右边的是基于四个角点的点云生成的MESH网格对象。
整个案例就在告诉我们,点云和MESH网格数据是可以互转的。
-
-
-
-
-
-
-
-
-
-
2.算法功能
按照我们的直觉来说哈,离散数据和连续数据互相转换。
离散数据,单个数据。

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 999
999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











