



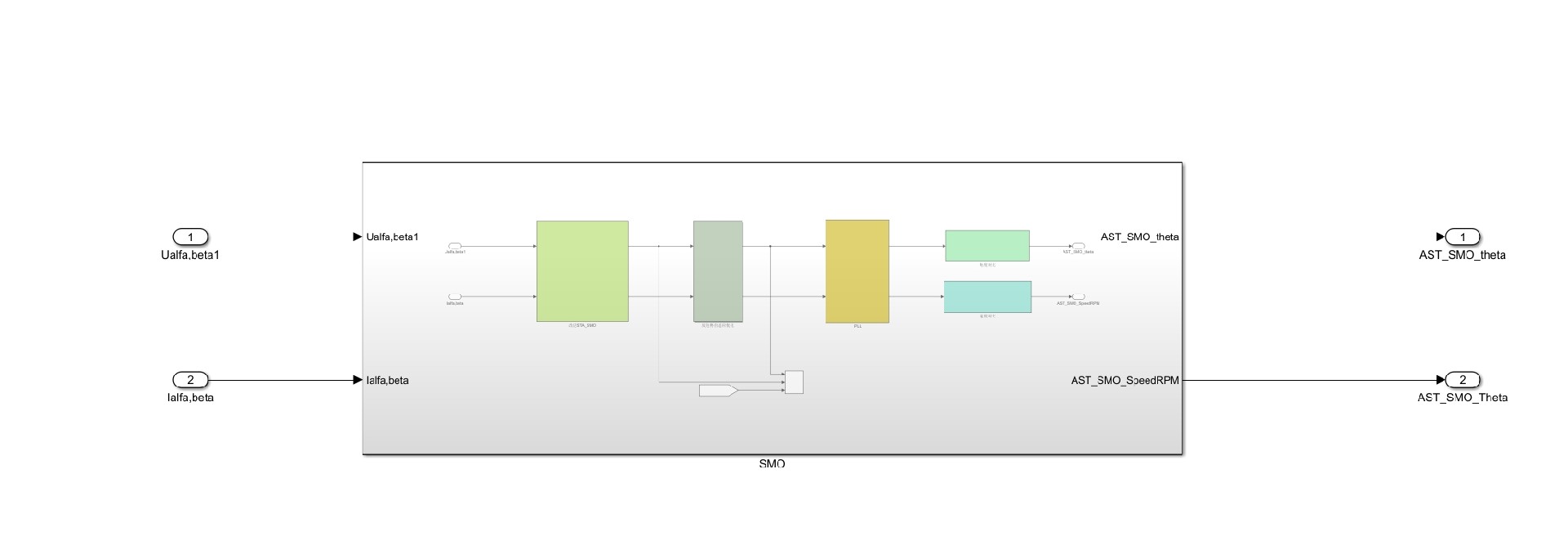
永磁电机改进超螺旋滑模观测器无位置传感器控制 STA-SMO能够克服传统SMO的抖振现象,但传统算法收敛时间较长, 且该时间仅与观测器增益系数和系统扰动上界有关. 因此STA-SMO虽然在滑模面附近具有强抗扰能力, 但当系统因扰动而远离滑模面 时, 观 测 器 无 法 迅 速 回 到 滑 模 面 上。 因此 采用一种改进的超螺旋滑模观测器永磁同步电机无位置传感器控制,该观测器在传统STA-SMO的基础上增加了观测误差的线性项, 增强了系统模态趋近过程的动态性能和抗干扰能力
永磁同步电机(PMSM)因其高效、高精度和高动态性能,在工业自动化、新能源汽车等领域得到了广泛应用。然而,传统的位置控制方法通常依赖于位置传感器,这会增加系统的复杂性和成本,同时也可能引入额外的故障点。因此,无位置传感器控制技术逐渐成为研究热点。
在无位置传感器控制中,滑模观测器(SMO)因其鲁棒性和对系统扰动的强抑制能力而备受关注。然而,传统SMO存在抖振现象,这会严重影响控制性能。为了解决这一问题,改进的滑模观测器——STA-SMO(Second-Order Terminal Sliding Mode Observer)应运而生。STA-SMO通过引入终端滑模面,有效减少了抖振现象,但同时也暴露出收敛时间过长的问题。
收敛时间过长的主要原因在于,传统STA-SMO的收敛速度仅与观测器增益系数和系统扰动上界有关。当系统因外界扰动或参数变化而偏离滑模面时,观测器无法快速回到滑模面上,这可能影响系统的动态响应性能。
为解决这一问题,一种改进的超螺旋滑模观测器被提出。该观测器在传统STA-SMO的基础上,引入了观测误差的线性项,从而增强了系统模态趋近过程的动态性能和抗干扰能力。改进后的观测器不仅继承了STA-SMO的强抗扰特性,还在收敛速度和动态响应上有了显著提升。
改进后的观测器设计原理
改进后的超螺旋滑模观测器的设计思路如下:
- 在传统STA-SMO的滑模面基础上,增加一个与观测误差成比例的线性项,以加速状态趋近于滑模面。
- 通过调整增益系数,使得观测器在面对外界扰动时,能够更快地恢复到稳定状态。
具体来说,改进的滑模观测器的数学表达式可以表示为:
$$
\dot{\hat{\omega}} = k1 e + k2 \text{sign}(e) + \alpha \dot{\theta}
$$
其中,$e$ 是观测误差,$\hat{\omega}$ 是观测器的角速度,$\dot{\theta}$ 是电机的机械角速度,$k1$ 和 $k2$ 是增益系数,$\alpha$ 是比例系数。
代码实现思路
以下是一个简化的Python代码示例,展示了改进后观测器的基本实现框架:
import numpy as np
k1 = 10.0 # 观测器增益系数
k2 = 5.0 # 观测器增益系数
alpha = 2.0 # 观测误差比例系数
# 观测器初始状态
omega_hat = 0.0 # 初始估计角速度
theta_dot = 0.0 # 输入机械角速度
# 观测误差
e = true_omega - omega_hat # true_omega为实际角速度
# 改进后的超螺旋滑模观测器
def improved_observer(e, omega_hat, theta_dot):
sign_e = np.sign(e)
omega_hat_dot = k1 * e + k2 * sign_e + alpha * theta_dot
return omega_hat_dot
# 更新估计角速度
omega_hat += improved_observer(e, omega_hat, theta_dot) * dt # dt为时间步长代码分析
在上述代码中,关键改进点在于加入了$\alpha \dot{\theta}$这一项。通过引入机械角速度的变化率,使得观测器能够更快地适应系统状态的变化,从而缩短收敛时间。具体来说:
k1 * e是传统的线性趋近项,用于加速趋近过程。k2 * sign(e)是滑模控制中的典型开关项,用于保证系统的鲁棒性。alpha * theta_dot则是改进项,通过机械角速度的变化率,进一步增强系统的动态性能。
实际应用中的优势
在实际应用中,改进后的观测器具有以下几个显著优势:
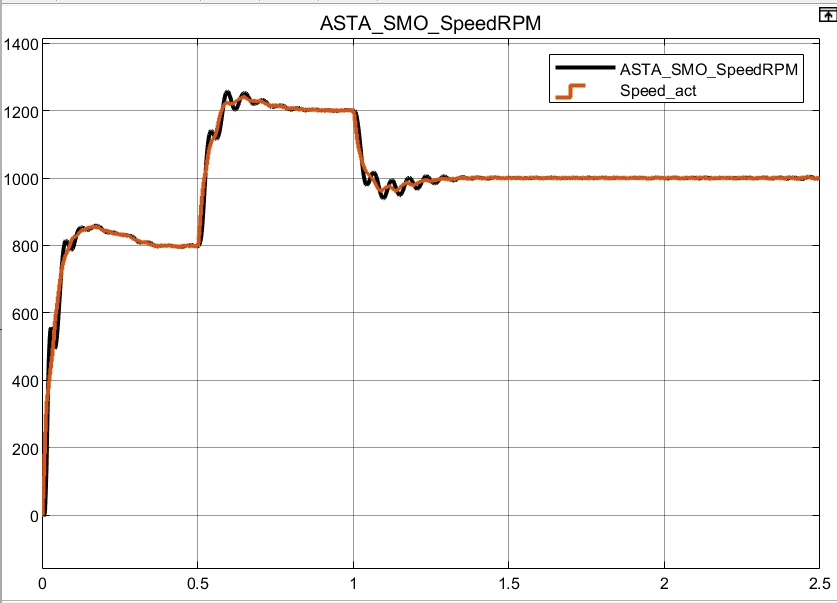
- 更快的收敛速度:在系统扰动或参数变化时,观测器能够更快地恢复到滑模面上,从而提高系统的响应速度。
- 更强的抗干扰能力:通过引入观测误差的线性项,系统的鲁棒性得到了进一步增强,能够更好地应对外界扰动。
- 更低的抖振幅度:改进后的观测器在保持强鲁棒性的同时,显著降低了传统滑模控制中的抖振现象,改善了系统的控制精度。
总之,这种改进的超螺旋滑模观测器为永磁同步电机的无位置传感器控制提供了一种有效的解决方案。通过理论分析和实验验证,其优越性已经得到了广泛认可。在未来,这一技术有望在更广泛的工业控制场景中得到应用。

















 223
223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









