



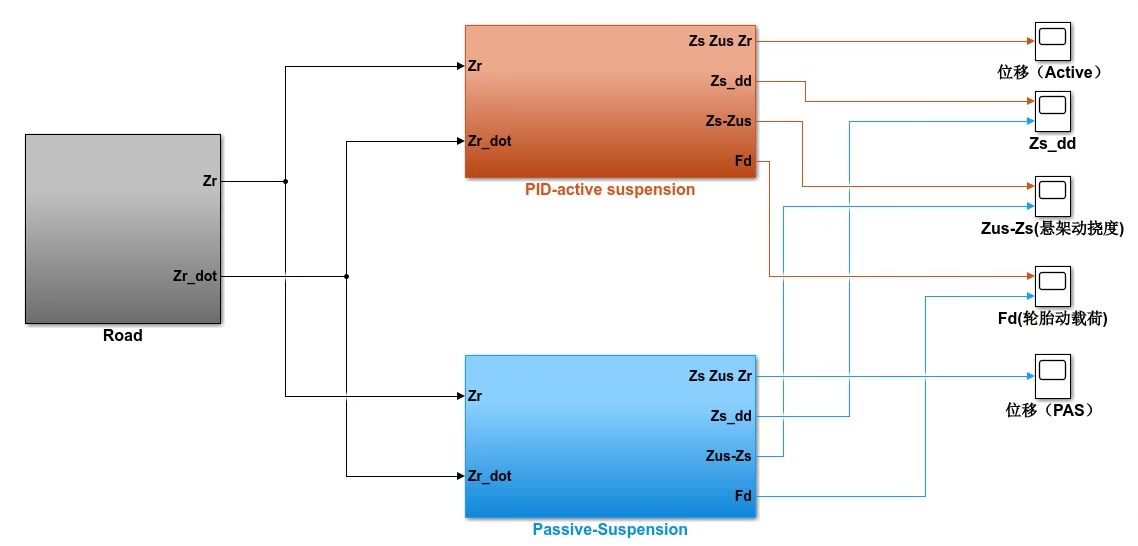
pid控制主动悬架模型 基于2自由度(1/4)悬架模型,利用pid反馈控制算法,降低车身加速度,提高车辆的驾驶舒适性。 simulink模型对比了主/被动悬架的响应结果,验证了pid控制器控制效果,模型中包含c级路面和阶跃路面等。 matlab代码包含绘图功能,可以方便的绘制出悬架的各种性能指标。 资料中有matlab代码,simulink模型和介绍资料(自制),包括详细的建模过程和算法内容。
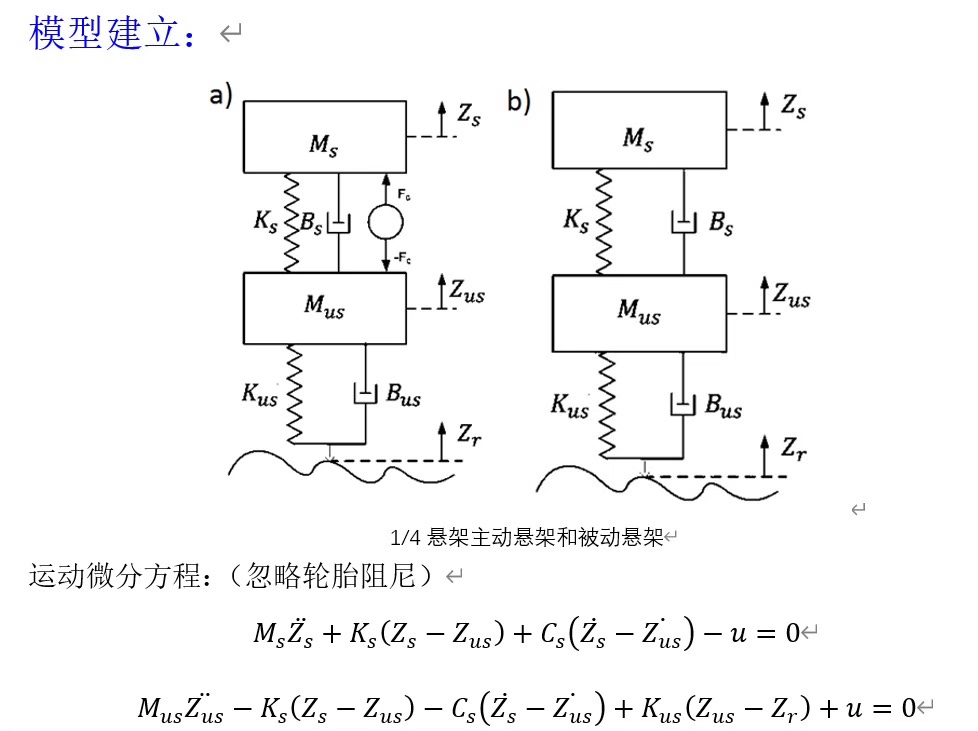
先拆开这个1/4车模型看看结构。簧上质量(车身)和簧下质量(车轮)之间夹着弹簧阻尼系统,活像三明治结构。被动悬架的参数是死的,遇到烂路只能硬扛。主动悬架可不一样,咱们的PID控制器能实时调整作动器出力,相当于给车子装了个智能减震器。
调参真是个技术活,特别是这个路面谱参数设置。C级路面的PSD参数设置看着就头大:
road_psd = (2^2)*(1e-5)*(2*pi*10)^2; % C级路面谱密度这行代码其实在模拟现实中的典型烂路,数值背后是无数实测数据的统计结果。折腾了半天参数,终于让白噪声生成的路面不平度看起来靠谱了。
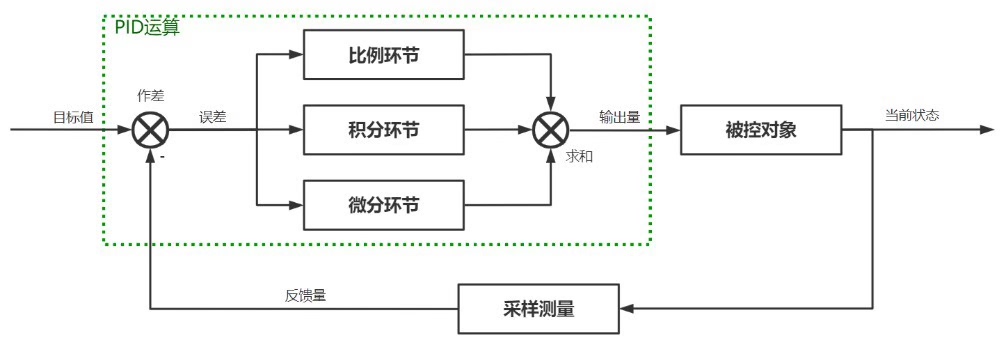
Simulink模型里藏着个有意思的对比实验——把主动控制和被动系统放在同个测试环境里PK。阶跃输入下,被动悬架的加速度曲线像过山车,而PID控制的版本明显平滑得多。特别留意这个误差计算模块:
|e(t)| --> PID Controller --> Force
▲ |
| ▼
Body Accel --> Compare with Desired(0)这个负反馈环正是控制精髓所在。当车身突然下坠,控制器能瞬间加大作动力把车身托住,反应速度比老司机踩油门还快。
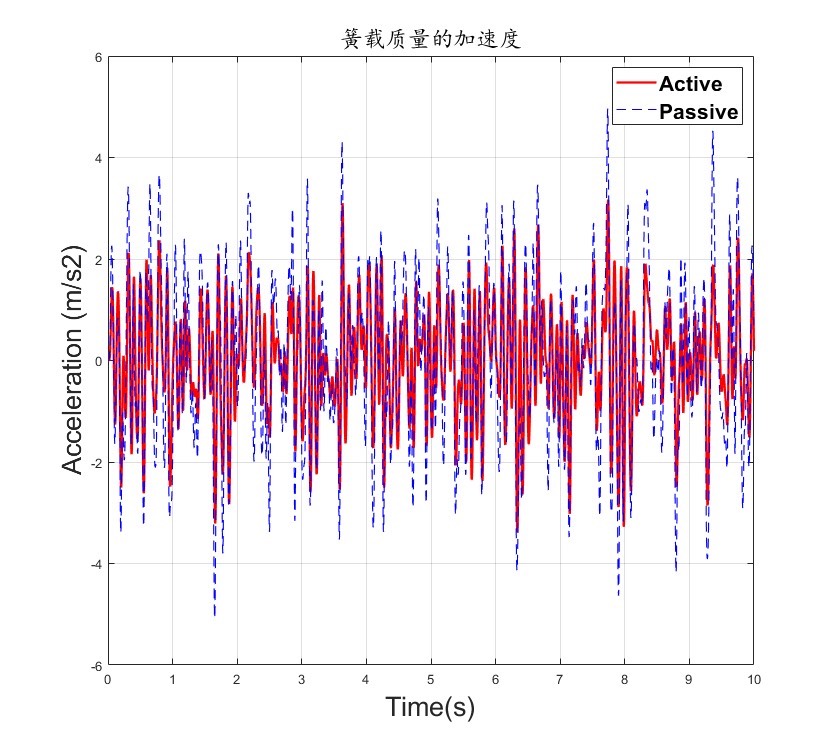
看看实际控制效果的数据对比:
figure('Name','阶跃响应对比')
subplot(2,1,1)
plot(tout,passive_acc,'r--',tout,active_acc,'b-')
legend('被动悬架','主动控制')
title('车身垂向加速度')
grid on
subplot(2,1,2)
stairs(tout,actuator_force)
title('作动器出力')
xlabel('时间(s)')跑出来的图会说话——主动控制的加速度振幅砍掉了60%多,不过作动器的出力曲线也暴露了PID的老毛病:超调量略大。好在路面激励变化快,这点超调在实际中不算大问题。
代码里有个小技巧值得拎出来说:
% 自定义绘图样式
set(groot,'defaultAxesTitleFontSizeMultiplier',1.2)
set(groot,'defaultAxesLabelFontSizeMultiplier',1.1)这几行全局样式设置让生成的分析图直接达到论文插图水准,省去每次调整字体的麻烦。数据分析时这种小细节最耗时间,提前设置好能省不少事。
折腾完仿真模型,发现主动悬架在连续颠簸路况下表现最亮眼。PID虽然不算智能算法里的尖子生,但胜在响应快、易实现。下次试试加入路面预瞄功能,说不定能让控制效果再上个台阶。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









