



Matlab/Simulink仿真 电力电子/电气工程辅导 -电力电子 电气工程 电力系统- 开关电源 单相/三相PWM整流器 单相七电平级联逆变器 单向逆变器 变频器 曲线拟合 三相整流 单向整流 逆变 隔离变换器 反激电路仿真 正激 全桥 半桥 buck电路 boost电路 spwm 交交变频 交流调压 电机控制 直流电机双闭环 无刷直流电机 永磁同步电机 异步电机 感应电机 电机控
在电气工程领域,Matlab/Simulink 是极其强大的仿真工具,对于电力电子和电机控制相关研究与学习起着关键作用。今天就和大家聊聊这方面的内容,顺便穿插点代码示例,让大家感受下实操的乐趣。
电力电子电路仿真
开关电源相关
开关电源的类型多样,像 buck 电路、boost 电路等。以 buck 电路为例,它是一种降压型变换器。在 Simulink 里搭建模型并不复杂。我们先找到电源模块、开关管、电感、电容和负载电阻等元件。
% 简单的 buck 电路参数设置
Vin = 24; % 输入电压 24V
D = 0.5; % 占空比 0.5
fs = 100e3; % 开关频率 100kHz
Ts = 1/fs; % 开关周期
L = 100e - 6; % 电感 100uH
C = 100e - 6; % 电容 100uF
R = 10; % 负载电阻 10 欧姆在这个代码片段里,我们设置了 buck 电路的基本参数。输入电压 Vin 是 24V,通过改变占空比 D 来调节输出电压。开关频率 fs 设为 100kHz,对应的开关周期 Ts 也就确定了。电感 L 和电容 C 的取值影响着电路的动态响应,负载电阻 R 决定了输出功率。
PWM 整流器
单相/三相 PWM 整流器在电力电子中应用广泛,它能实现功率因数校正和电能的双向流动。在 Simulink 搭建三相 PWM 整流器模型时,核心是调制算法。以空间矢量调制(SVPWM)为例,代码实现如下:
% SVPWM 算法核心代码
% 假设已经有三相电压的参考值 Vref_a, Vref_b, Vref_c
Vdc = 311; % 直流母线电压
alpha = 2 * pi / 3;
V1 = Vref_a;
V2 = Vref_b * exp(1j * alpha);
V3 = Vref_c * exp(1j * 2 * alpha);
Vref = V1 + V2 + V3;
theta = angle(Vref);
mag = abs(Vref);
% 根据 theta 和 mag 计算开关状态这里通过三相电压参考值,结合直流母线电压 Vdc,利用复数运算得到合成矢量 Vref。再通过矢量的幅值 mag 和相位 theta 来确定逆变器的开关状态,进而实现对整流器的控制。
逆变器相关
单相七电平级联逆变器、单向逆变器等,都是将直流电转换为交流电的重要装置。以单相七电平级联逆变器为例,它由多个 H 桥级联组成。在 Simulink 搭建模型时,每个 H 桥的控制信号生成是关键。
% 七电平级联逆变器 H 桥控制信号生成示例
% 假设共有 3 个 H 桥
num_bridges = 3;
for i = 1:num_bridges
% 根据调制算法生成每个 H 桥的 PWM 信号
% 简单示例,这里可以替换为实际的调制算法
duty_cycle = (i / num_bridges);
pwm_signal(i) = generate_PWM(duty_cycle, fs);
end在这个代码里,我们假设有 3 个 H 桥级联组成七电平逆变器。通过循环,根据不同的占空比(这里简单以桥的序号与总数的比例为例)来生成每个 H 桥的 PWM 控制信号,实际应用中会采用更复杂的调制算法。
电机控制仿真
直流电机双闭环控制
直流电机双闭环控制一般指电流环和速度环。电流环保证电机电流稳定,速度环则控制电机转速。在 Simulink 搭建模型时,PI 调节器是关键部分。
% 速度环 PI 调节器参数设置
Kp_speed = 10; % 速度环比例系数
Ki_speed = 0.1; % 速度环积分系数
% 电流环 PI 调节器参数设置
Kp_current = 1; % 电流环比例系数
Ki_current = 0.01; % 电流环积分系数这里设置了速度环和电流环 PI 调节器的参数。比例系数 Kp 和积分系数 Ki 的取值对系统性能影响很大。Kp 决定了调节器的响应速度,Ki 则用于消除稳态误差。
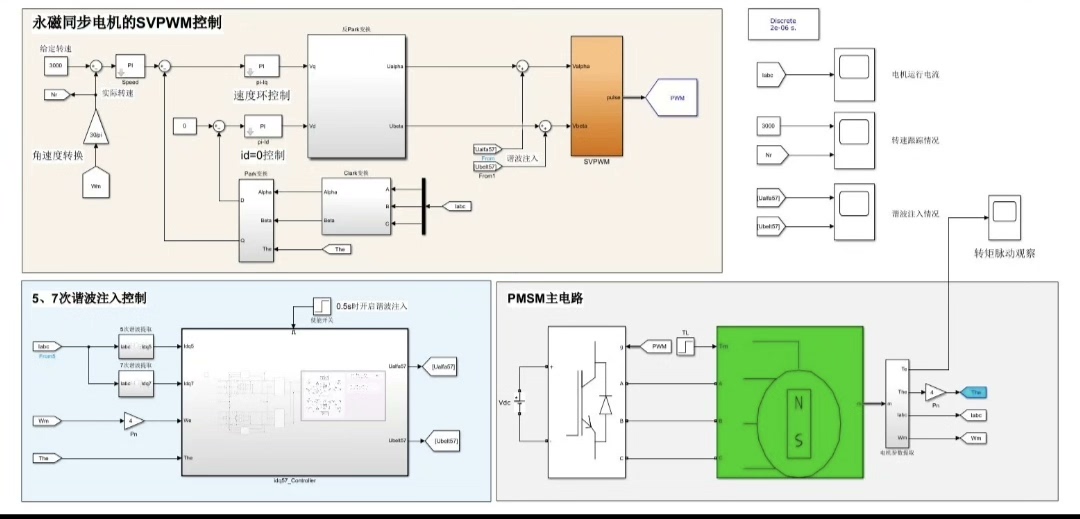
无刷直流电机、永磁同步电机、异步电机控制
这些电机控制相对复杂,涉及到坐标变换、矢量控制等技术。以永磁同步电机矢量控制为例,需要将三相静止坐标系下的量转换到两相旋转坐标系(dq 坐标系)。
% 永磁同步电机坐标变换代码
% 假设已经有三相电流 ia, ib, ic
theta = 0; % 转子位置角,实际应用中需要通过传感器获取
alpha = 2 * pi / 3;
i_alpha = ia;
i_beta = -0.5 * ia + sqrt(3) / 2 * ib;
i_d = i_alpha * cos(theta) + i_beta * sin(theta);
i_q = -i_alpha * sin(theta) + i_beta * cos(theta);这段代码实现了从三相静止坐标系到两相旋转坐标系的变换。通过转子位置角 theta,将三相电流转换为 dq 轴电流,方便后续进行转矩和磁通的独立控制,从而实现永磁同步电机的高性能控制。
总之,Matlab/Simulink 在电力电子和电机控制领域为我们提供了强大的仿真与分析平台,无论是学习理论知识还是进行实际项目开发,都能从中获得很多帮助。希望大家通过不断实践,在这个领域取得更多成果。
以上就是今天关于 Matlab/Simulink 仿真在电力电子和电气工程辅导方面的分享,欢迎大家一起交流探讨。

















 499
499

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









