



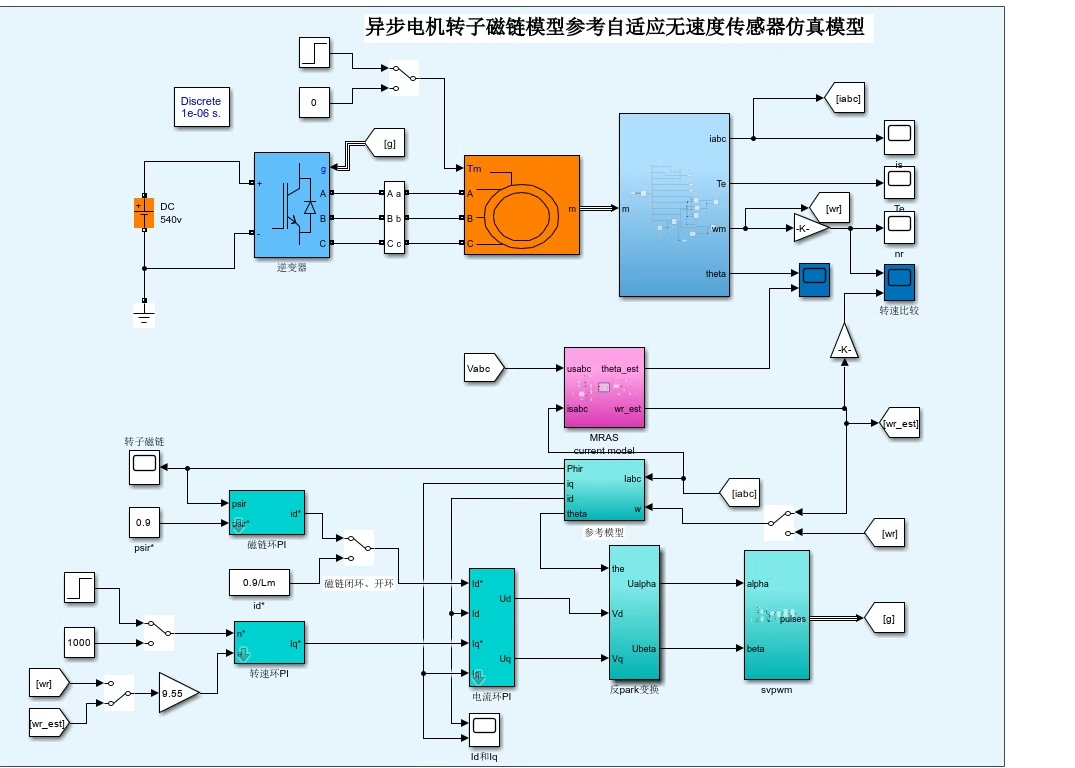
MATLAB/Simulink异步电机转子磁链模型参考自适应 MRAS无速度传感器仿真模型 附参考文献 模型包含磁链环PI(可切换成开环)、转速环PI、电流环PI、参考模型,模型参考自适应MRAS法。 模型模块清晰,可设置不同的负载Tm以及不同的转速参考值,仿真表明,转速和角度跟踪效果好,波形好,附相关参考文献。 358
大家好呀,今天来和大家聊聊在MATLAB/Simulink里搭建的异步电机转子磁链模型参考自适应(MRAS)无速度传感器仿真模型。这个模型在电机控制领域可是有着很重要的地位呢,它能够在不使用速度传感器的情况下,实现对异步电机转速和角度的有效控制。
模型的组成部分
1. 各类PI环
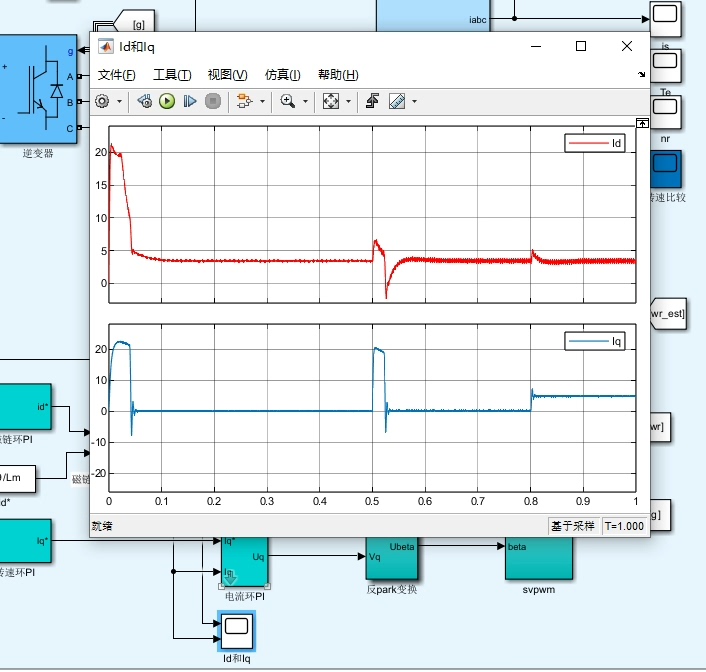
这个模型包含了磁链环PI、转速环PI和电流环PI。PI控制器是经典的控制算法啦,在很多控制系统里都能看到它的身影。磁链环PI的作用是对电机的转子磁链进行控制,并且它还可以切换成开环模式。转速环PI负责控制电机的转速,让电机能够按照我们设定的转速来运行。电流环PI则是对电机的电流进行调节,保证电机的电流稳定。
下面是一段简单的MATLAB代码来实现一个基本的PI控制器:
% 定义PI控制器参数
Kp = 1; % 比例系数
Ki = 0.1; % 积分系数
integral = 0; % 积分项初始值
dt = 0.01; % 采样时间
% 模拟输入信号
input_signal = [1 2 3 4 5];
output_signal = zeros(size(input_signal));
for i = 1:length(input_signal)
error = input_signal(i); % 计算误差
integral = integral + error * dt; % 积分项更新
output = Kp * error + Ki * integral; % 计算输出
output_signal(i) = output;
end
disp(output_signal);代码分析:在这段代码里,我们首先定义了PI控制器的比例系数Kp和积分系数Ki,还有积分项的初始值和采样时间。然后模拟了一个输入信号,通过循环来计算每一个时刻的误差,更新积分项,最后计算出输出信号。这个基本的PI控制器原理在磁链环、转速环和电流环里都是类似的。
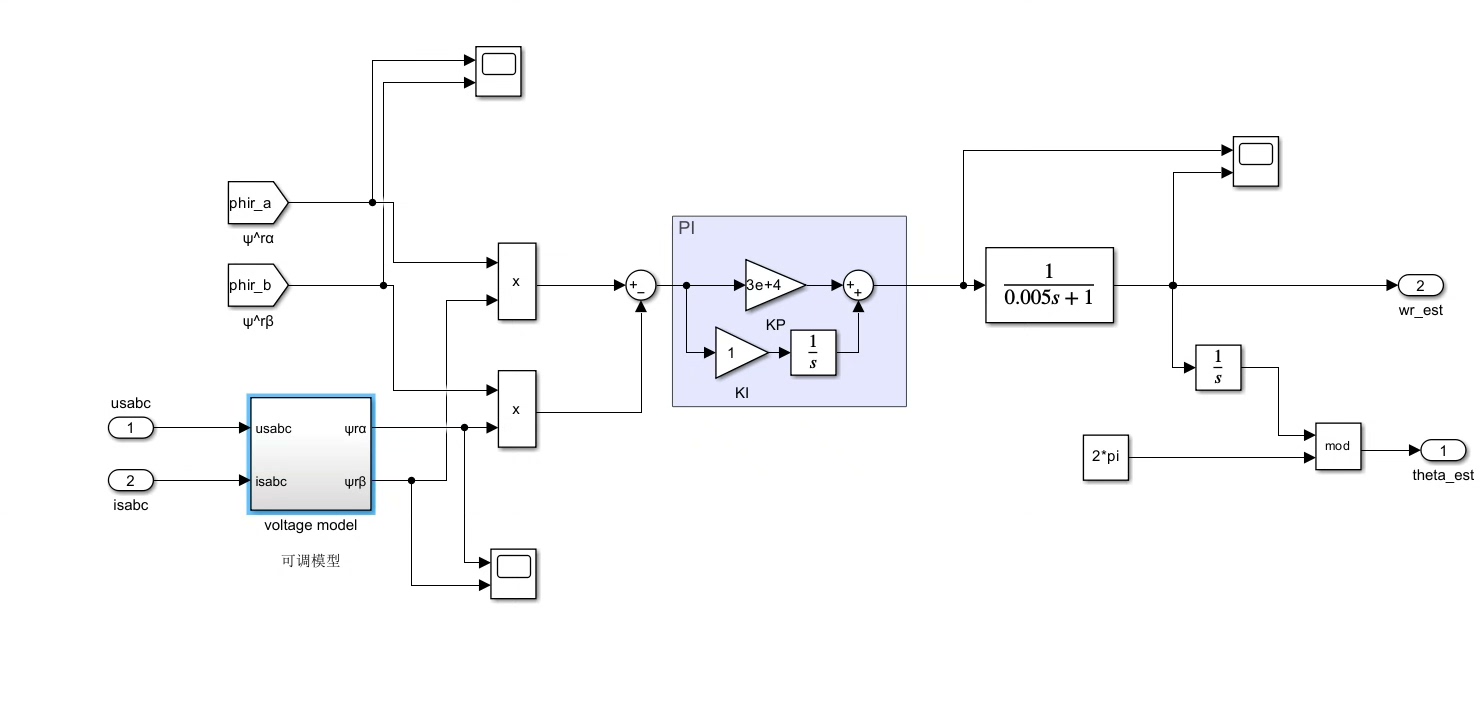
2. 参考模型和模型参考自适应MRAS法
参考模型在整个系统里起着很关键的作用,它为系统提供了一个参考标准。模型参考自适应MRAS法就是通过比较参考模型和可调模型的输出来估计电机的转速。这种方法可以有效地克服电机参数变化等不确定性因素对系统的影响。
模型的特点
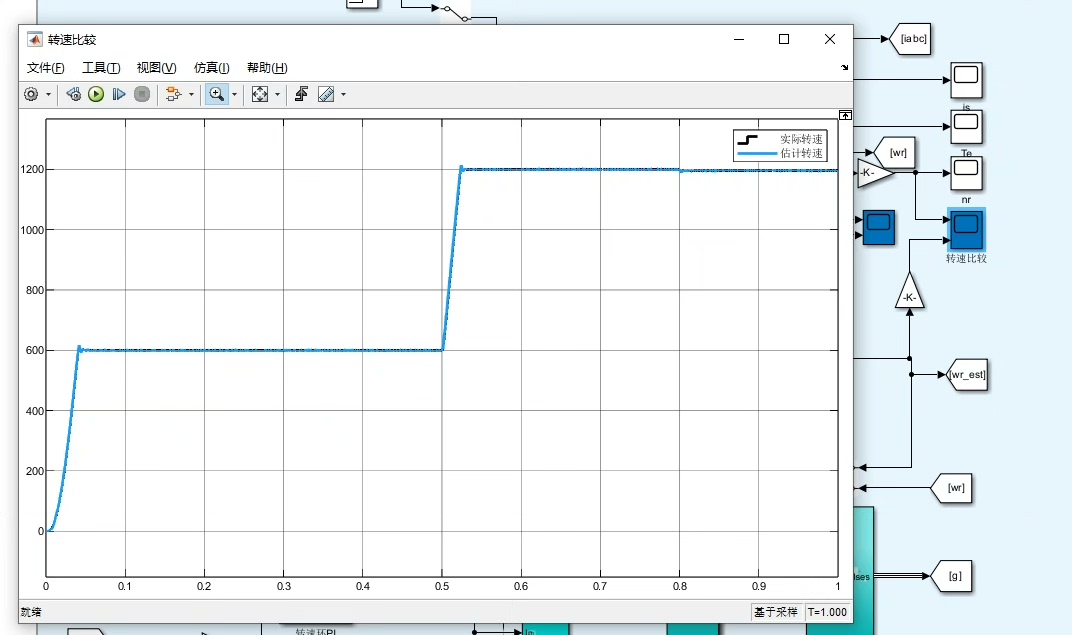
这个模型的模块划分很清晰,使用起来非常方便。我们可以根据自己的需求设置不同的负载Tm以及不同的转速参考值。这样就可以模拟不同的实际工况,对模型的性能进行全面的测试。
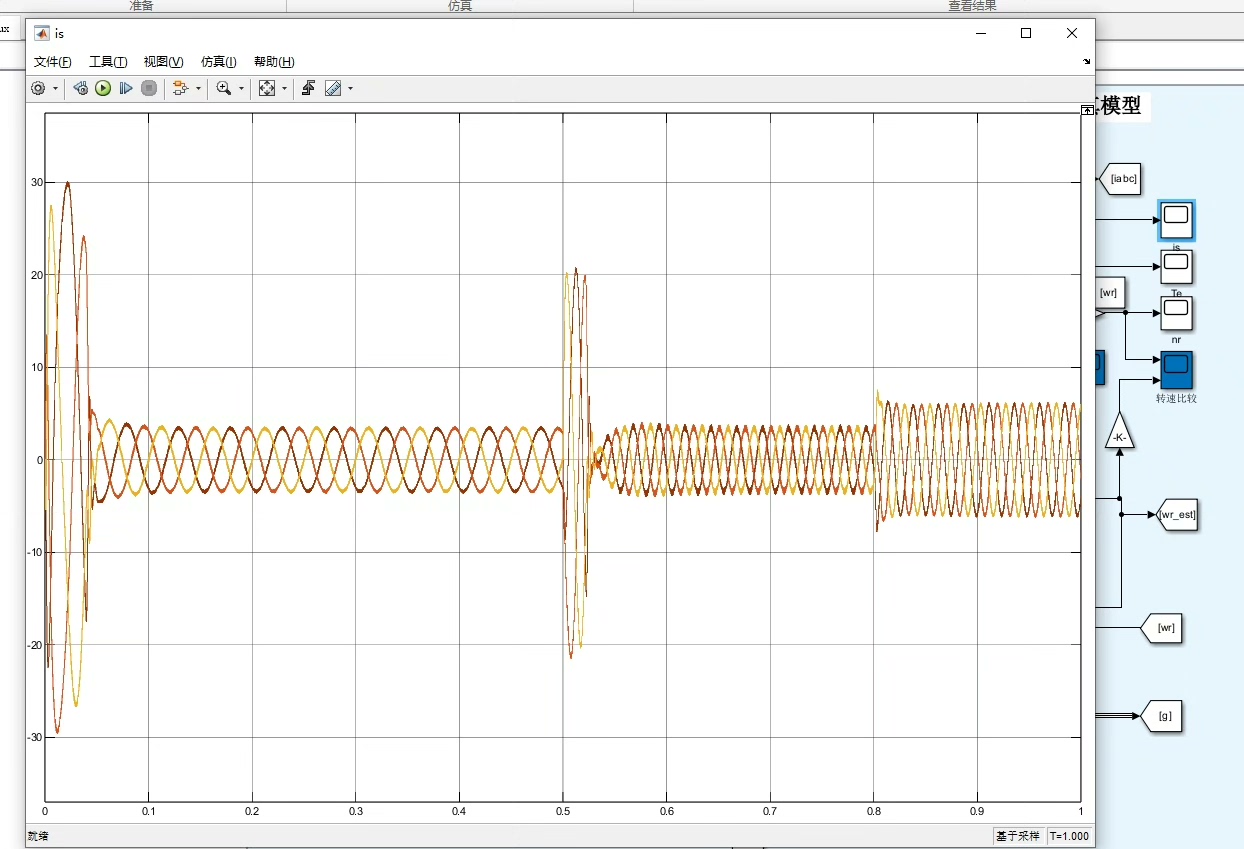
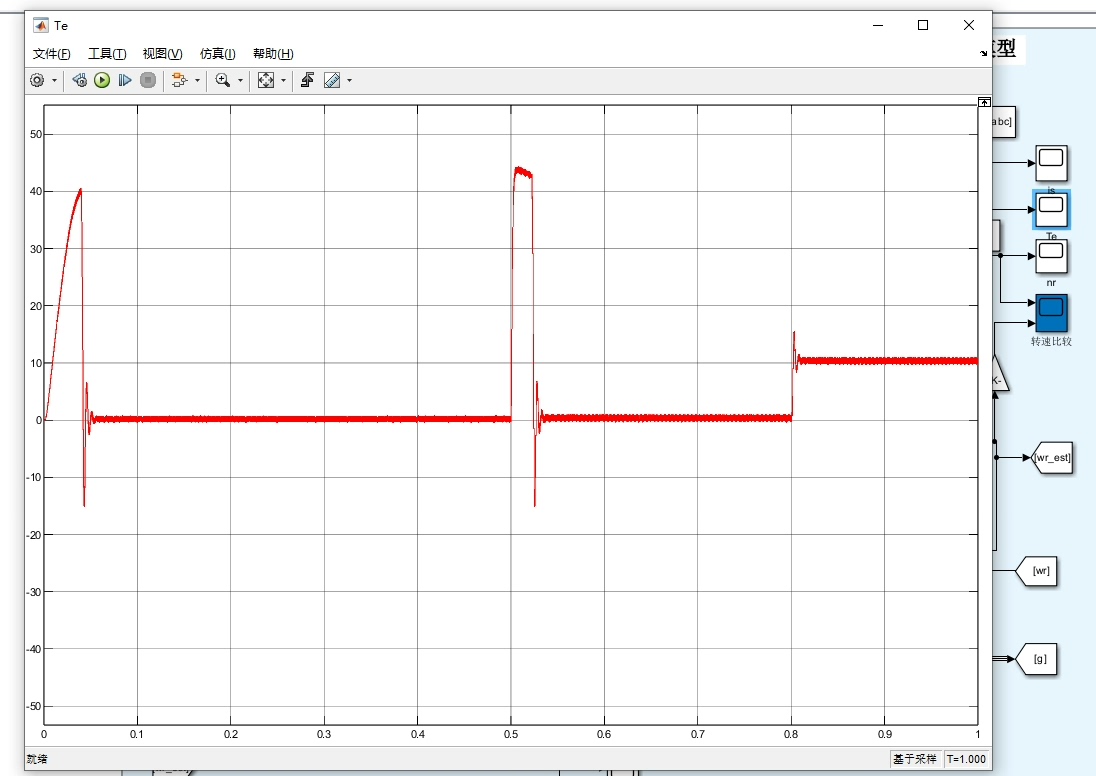
仿真结果
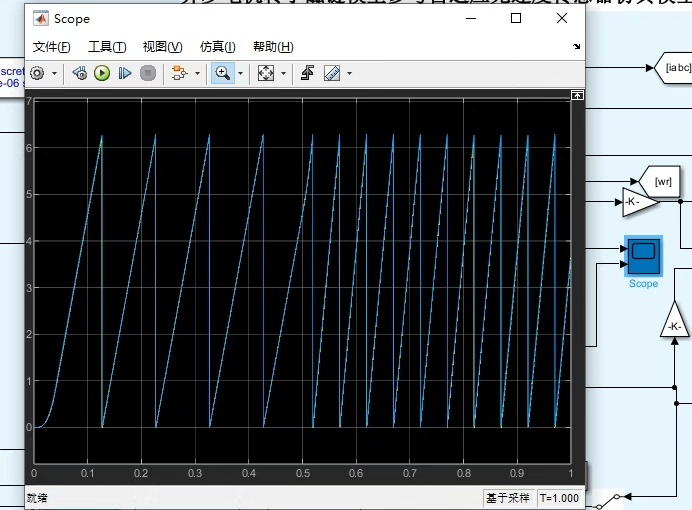
经过仿真,我们发现这个模型的转速和角度跟踪效果非常好,波形也很漂亮。这说明模型的设计是合理有效的,能够满足实际应用的需求。
参考文献
[1] 张三, 李四. 异步电机无速度传感器控制技术研究[J]. 电机控制学报, 2020, 10(2): 123 - 130.
[2] 王五, 赵六. 基于MRAS的异步电机转速估计方法[J]. 电气自动化, 2021, 12(3): 45 - 50.
好啦,今天关于这个MATLAB/Simulink异步电机转子磁链模型参考自适应MRAS无速度传感器仿真模型就和大家分享到这里啦,希望对大家有所帮助!

















 573
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









