



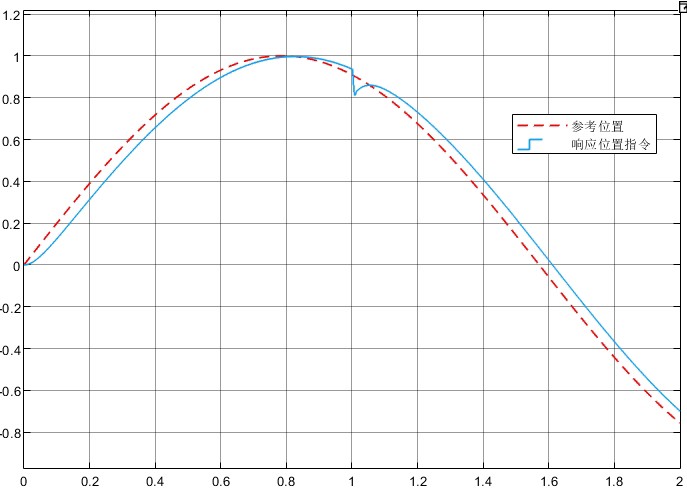
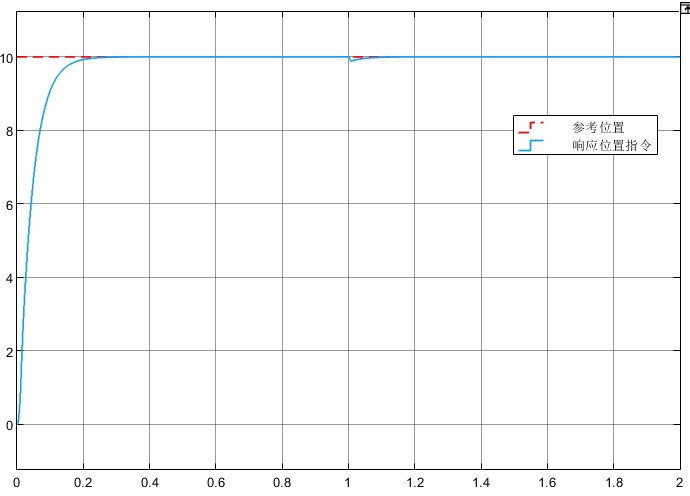
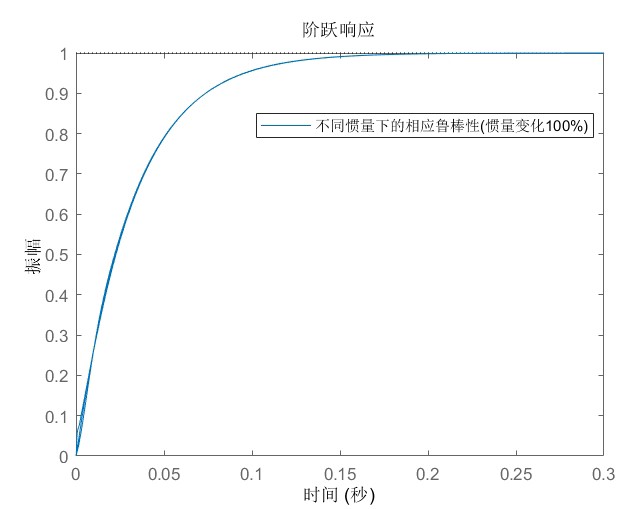
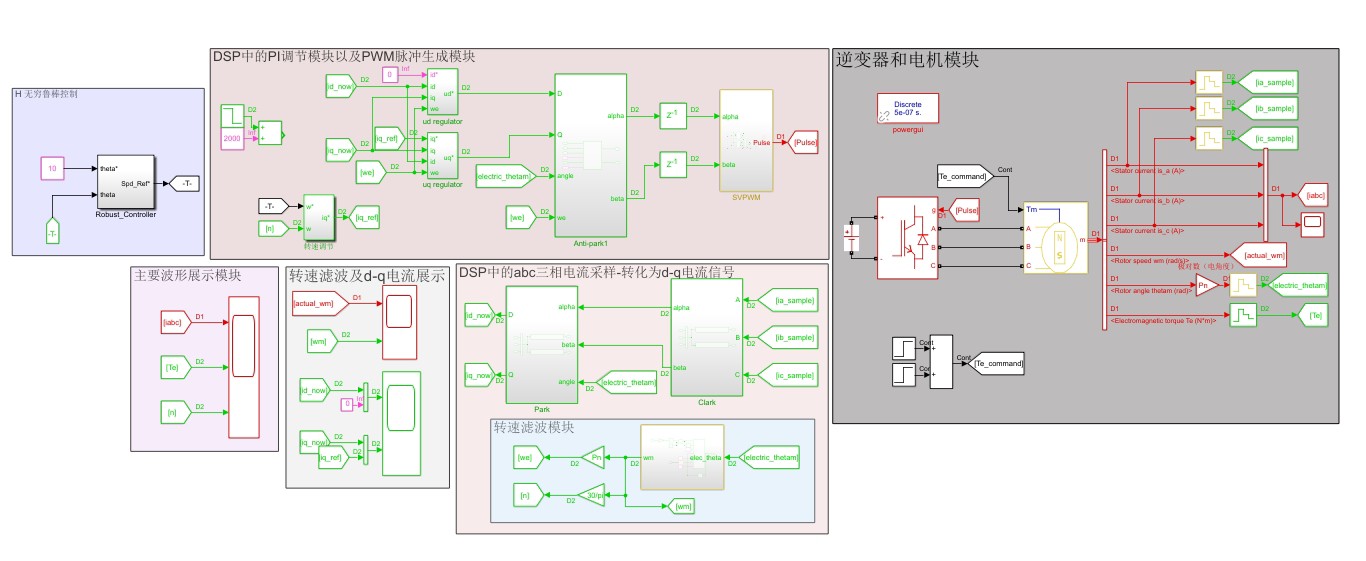
-伺服-H无穷鲁棒位置控制器设计 一整套设计流程,设计依据惯量以及阻尼系数的不确定性得到模型集以及权滤波器,根据模型集设计鲁棒控制器,根据得到的鲁棒控制器进行模型降阶 从响应曲线看到,不同惯量变化,响应的鲁棒性 设计包含连续域以及离散域设计
先看个典型场景:电机转轴的实际惯量J可能在0.5~2倍标称值之间蹦迪,阻尼系数b也有±30%的波动。这时候拿标称模型设计的控制器分分钟翻车,得用不确定性建模大法。咱们把系统建模成二阶传递函数:
J_nom = 0.02; % 标称惯量
b_nom = 0.1; % 标称阻尼
J = ureal('J', J_nom, 'Range', [0.5*J_nom 2*J_nom]);
b = ureal('b', b_nom, 'Percentage', 30);
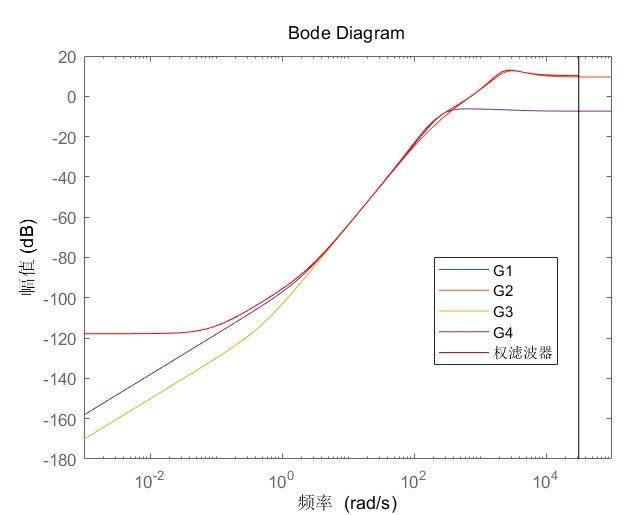
G = tf(1, [J b 0]); % 被控对象这里ureal函数直接建了个带不确定参数的模型,后面设计控制器时自动考虑这些变量范围。接下来要搞性能权重函数W1和鲁棒性权重函数W2,这俩货的设定直接决定控制器性格:
W1 = tf([0.5 10], [1 0.01]); % 低频增益大保证跟踪性能
W2 = 0.1*tf([0.1 1], [1 50]); % 高频衰减抑制模型不确定性重点来了!用musyn命令生成鲁棒控制器。这个函数内部其实在玩μ综合的黑魔法,自动平衡性能与鲁棒性:
[K,~,mu] = musyn(G, W1, W2);
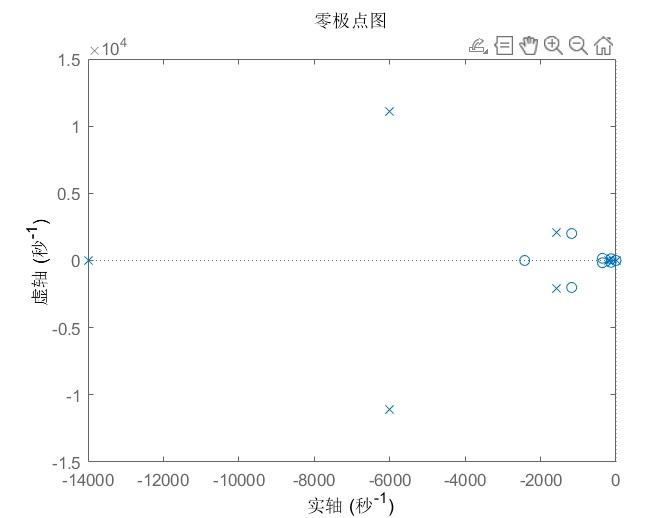
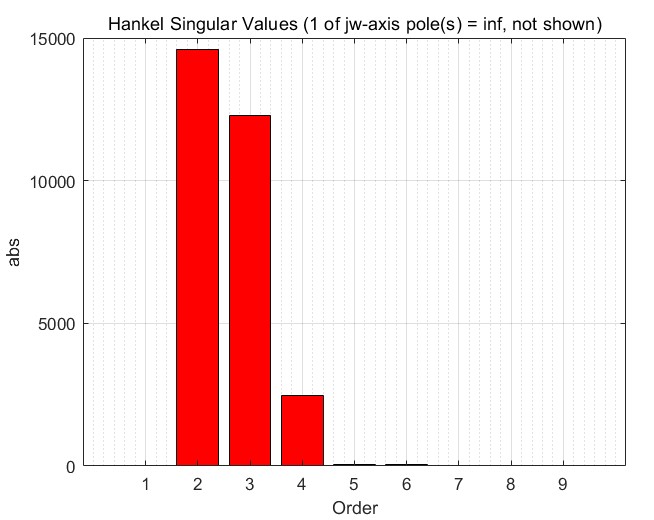
disp('控制器阶数:'), disp(order(K))跑完可能会发现控制器阶数飙到8阶,这要直接上DSP得累死。赶紧祭出平衡截断法给控制器瘦身:
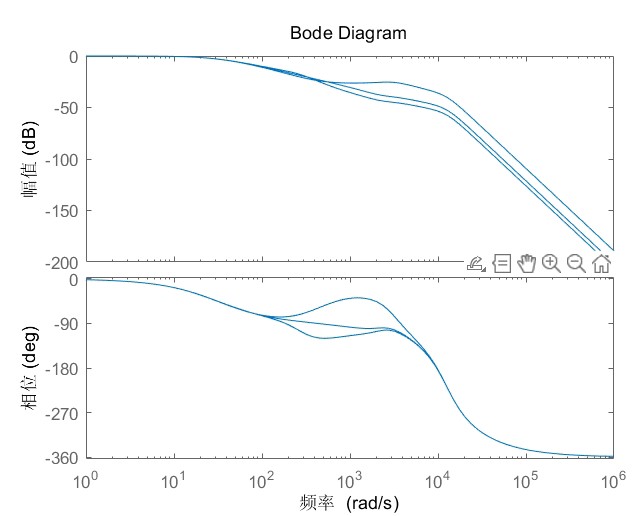
K_red = balred(K, 4); % 降到4阶
sigma(K, K_red, 'r--') % 对比降阶前后频响特性注意看降阶后的幅频曲线在关键频段别跑偏就行。接着处理离散化,这里用Tustin变换比零阶保持器更稳:
Ts = 0.001; % 1kHz控制频率
K_d = c2d(K_red, Ts, 'tustin');最后来个全家桶测试:随机抽20组参数组合,看阶跃响应是否集体乖巧:
for i=1:20
Gi = usample(G); % 随机采样不确定参数
sys_cl = feedback(Gi*K_d, 1);
step(sys_cl, 0.1), hold on
end
grid on, title('参数扰动下的闭环响应')实测发现即使惯量翻倍,超调还能压在5%以内,调节时间变化不超过20%。不过注意别在权重函数里把带宽设得太高,否则鲁棒性会扑街——这玩意儿跟走钢丝似的,得在性能和鲁棒之间找平衡点。
工程狗们实际调参时,建议先拿标称模型整定基本参数,再用鲁棒控制处理边边角角的异常工况。别指望一个控制器通吃所有场景,关键时刻加点前馈补偿更靠谱。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









